|
Простой робот для начинающего без мк
|
|
| Space | Дата: Суббота, 14.06.2008, 10:03 | Сообщение # 1 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| О элементах сборки:
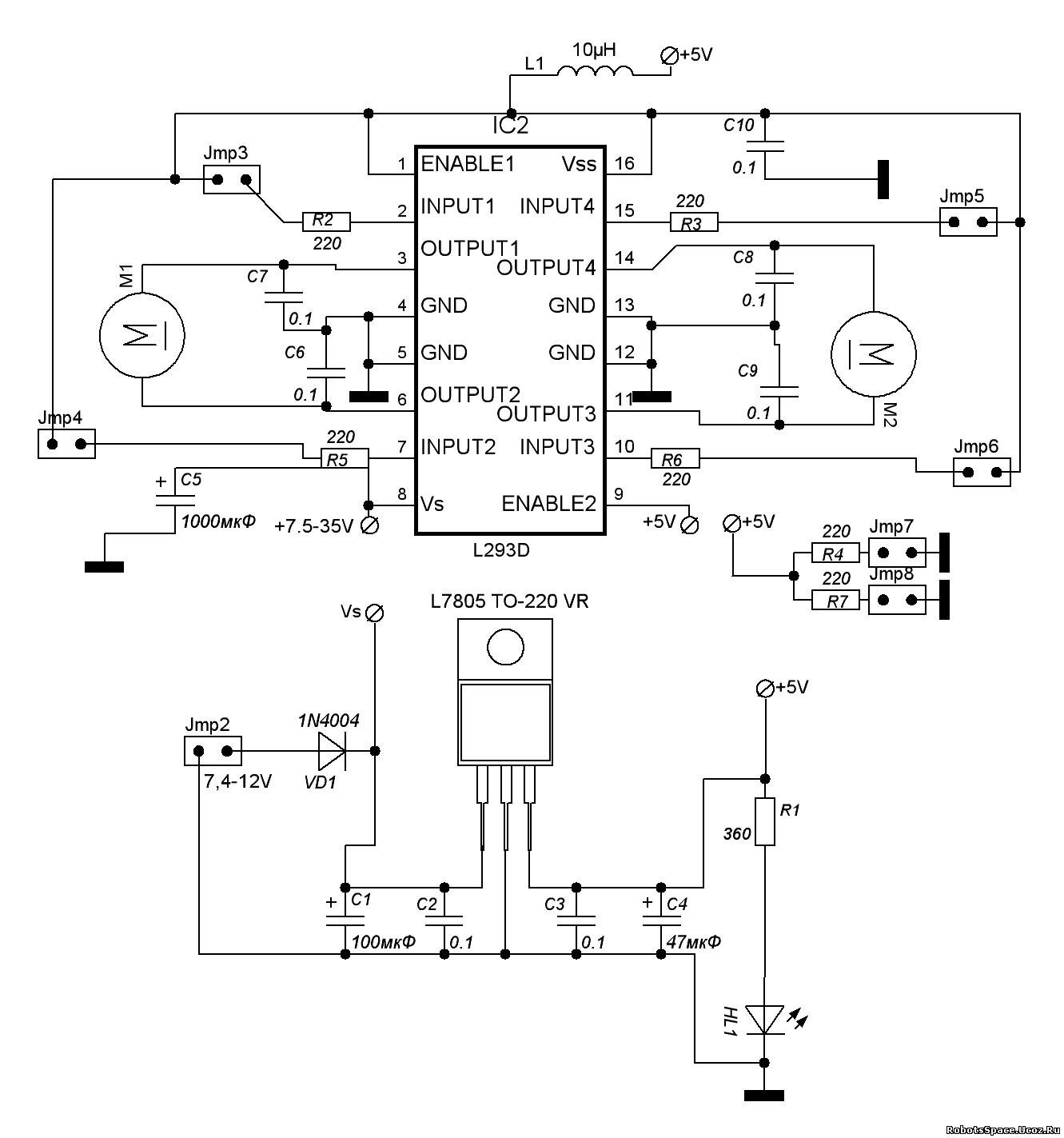
Микросхема L293D
Стабилизатор на 5 вольт
Диод 1N4004 -VD1
Конденсаторы:
по 0,1мкФ-7штук -C2, C3, C6, C7, C8, C9, C10
по 1000мкФ-1штука -С5
по 100мкФ-1штука -С1
по 47мкФ-1штука - С4
Светодиод зелёный -HL1
Резисторы:
360 Ом -R1
220 Ом - 6 штук -R2, R3, R4, R5, R6, R7
Дроссель 10мкГ -L1 Этот робот сделан специально для тех кто задаёт вопросы типа: "а можно ли сделать робота без мк?" или которые просто не хотят учить языков программирования, или они просто не могут этого сделать. Сдесь всего одна микросхема L293D, которую не надо программировать.  Кроме неё ещё несколько кондёров, резисторов, светодиод, диод, кренка, а какие именно увидете на принципиальной схеме. Кроме неё ещё несколько кондёров, резисторов, светодиод, диод, кренка, а какие именно увидете на принципиальной схеме.  Кстати вот она: Кстати вот она:
В принципе ни чего сложного. Подключая датчики на INPUT1(ножка 2) и INPUT4(ножка 15) ваш робот будет двигаться вперёд  , а подключая датчики(фотодиоды, фототранзисторы и др.) на INPUT2(ножка 7) и INPUT3(ножка 10) робот будет двигаться назад. Все эти контакты выведены на плате, а так же контакты под светодиоды, если ваш робот будет предназначен для движения по линии. , а подключая датчики(фотодиоды, фототранзисторы и др.) на INPUT2(ножка 7) и INPUT3(ножка 10) робот будет двигаться назад. Все эти контакты выведены на плате, а так же контакты под светодиоды, если ваш робот будет предназначен для движения по линии.  Только совет. Слишком крутые повороты не делайте т. к. это не мк, который можно настроить на любую дорожку. Только, если скорость будет низкой робот сможет чётко следовать по ней. На быстрой скорости это не прокатит. Только совет. Слишком крутые повороты не делайте т. к. это не мк, который можно настроить на любую дорожку. Только, если скорость будет низкой робот сможет чётко следовать по ней. На быстрой скорости это не прокатит.
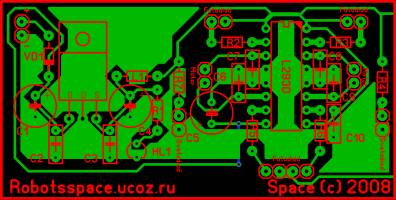
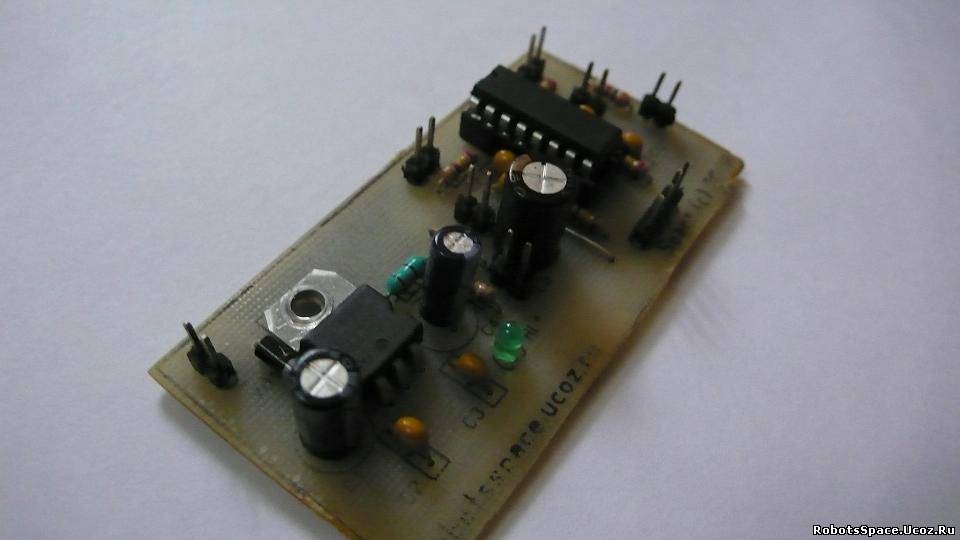
Сама плата как видете не большая. И в сборке будет интересна. Кренка стабилизирует напряжение до пяти вольт. Максимум на схему можно подать 12 вольт. На питание двигателей Vs максимум 35 вольт. Минимум 5. На саму микросхему Vss максимум 5 вольт. На разведённой плате это всё уже сделано. Всё конденсаторы установленные на плате позволяют чётко работать всей схеме снимая все помехи, которые могут возникнуть например от моторов. Теперь перейдём к монтажу. Я уже сделал эту плату, а вам пока это только предстоит, если конечно захотите.
 
Проверяя плату она показала стабильную работу. И после этого я её опробовал на 2 платформах. 1 это гусеницы:  На видео продемонстрирую как едит по линии: На видео продемонстрирую как едит по линии:
Кстати новичкам лучше купить сразу готовую платформу и именно с танковым приводом, ну или машинку которая может разворачиваться на месте. Но ещё можно купить 2 сервопривода. Но они обойдутся где-то в 600-800 рублей. А следующие видео и будет именно с сервоприводами. Робот будет ехать по линии и следовать за рукой. Он может также просто ехать на свет. После подборки светодиодов, то есть, какие лучше отражаются от белой поверхности. Было решено взять белые светодиоды. Так как с ними работают датчики на много лучше, чем с красными. Ну а теперь завершающих два видео. Плату и принципиальную схему скачивайте ниже. Если будут вопросы оброщайтесь.
Если кто соберёт, то смело выкладывайте внаши достижения
|
| |
| |
| Vern | Дата: Суббота, 18.04.2009, 16:49 | Сообщение # 106 |
Зарегистрирован 08.04.2009
Группа: Новички
Сообщений: 55
Город: Санкт-Петербург
Статус: Offline
| Помогите пожалуста!!
1)Не нашел схему на робота который следует за рукой
2)А фототранзисторы любые можно, а светодиоды какие(робот по черной линии)?
|
| |
| |
| sasha | Дата: Суббота, 18.04.2009, 16:53 | Сообщение # 107 |
Язык программированя: Си и баском(учусь)
Зарегистрирован 16.02.2009
Группа: Новички
Сообщений: 371
Город: Актюбинск
Статус: Offline
| Quote (Vern) светодиоды какие
бери светлые
Quote (Vern) Не нашел схему на робота который следует за рукой
сделай первую схему(просто поменяй полярность двигателей)!!!
-=Наша_зависимость_от_роботов_возрастает_с_каждым_днем=-
|
| |
| |
| Vern | Дата: Суббота, 18.04.2009, 17:49 | Сообщение # 108 |
Зарегистрирован 08.04.2009
Группа: Новички
Сообщений: 55
Город: Санкт-Петербург
Статус: Offline
| ладно окей есть еще один вопрос если делать на макетной плате как такую большую плоскость паять? 
|
| |
| |
| sasha | Дата: Суббота, 18.04.2009, 17:58 | Сообщение # 109 |
Язык программированя: Си и баском(учусь)
Зарегистрирован 16.02.2009
Группа: Новички
Сообщений: 371
Город: Актюбинск
Статус: Offline
| Чтобы вставить картинку в сообщение скопируйте надпись $Image1$ и вставьте её в то место где хотели бы видеть картинку! $Image1$ Появляется после выбора картинки справа от обзора!!!!!
а на макете ты только ножки соединяешь! а эти заливалки что бы экономить кислоту при травлении(я так думаю)!!!!
-=Наша_зависимость_от_роботов_возрастает_с_каждым_днем=-
|
| |
| |
| Vern | Дата: Суббота, 18.04.2009, 18:00 | Сообщение # 110 |
Зарегистрирован 08.04.2009
Группа: Новички
Сообщений: 55
Город: Санкт-Петербург
Статус: Offline
| ЛАДНО окей помотрим спасибо за ответ
|
| |
| |
| Санёк | Дата: Суббота, 18.04.2009, 19:21 | Сообщение # 111 |
Зарегистрирован 20.06.2008
Группа: Новички
Сообщений: 66
Город: Омск
Статус: Offline
| Вот читаю я эту тему и не понимаю а что это робот делает? 
Сообщение отредактировал Санёк - Суббота, 18.04.2009, 19:21 |
| |
| |
| sasha | Дата: Суббота, 18.04.2009, 19:33 | Сообщение # 112 |
Язык программированя: Си и баском(учусь)
Зарегистрирован 16.02.2009
Группа: Новички
Сообщений: 371
Город: Актюбинск
Статус: Offline
| читай тему сначала!!! Добавлено (18.04.2009, 19:33)
---------------------------------------------
ВНИМАТЕЛЬНЕЙ читай!!!!
-=Наша_зависимость_от_роботов_возрастает_с_каждым_днем=-
|
| |
| |
| Санёк | Дата: Суббота, 18.04.2009, 19:39 | Сообщение # 113 |
Зарегистрирован 20.06.2008
Группа: Новички
Сообщений: 66
Город: Омск
Статус: Offline
| Он по линии гоняет что-ли? А я что-то сначала не понял что за Input.
|
| |
| |
| sasha | Дата: Суббота, 18.04.2009, 22:00 | Сообщение # 114 |
Язык программированя: Си и баском(учусь)
Зарегистрирован 16.02.2009
Группа: Новички
Сообщений: 371
Город: Актюбинск
Статус: Offline
| Quote (Санёк) А я что-то сначала не понял что за Input.
туда датчики соединяешь!!!
-=Наша_зависимость_от_роботов_возрастает_с_каждым_днем=-
|
| |
| |
| Санёк | Дата: Воскресенье, 19.04.2009, 15:33 | Сообщение # 115 |
Зарегистрирован 20.06.2008
Группа: Новички
Сообщений: 66
Город: Омск
Статус: Offline
| Quote (sasha) Quote (Санёк)А я что-то сначала не понял что за Input. туда датчики соединяешь!!!
Давай по меньше восклицательный знаков в сообщениях имей уважение.
|
| |
| |
| Vern | Дата: Воскресенье, 19.04.2009, 16:12 | Сообщение # 116 |
Зарегистрирован 08.04.2009
Группа: Новички
Сообщений: 55
Город: Санкт-Петербург
Статус: Offline
| БЛин возникла проблема, не знаю как паять схему на макетной плате, как пропаять там дорожки, а то на рисунке не понятно 
|
| |
| |
| Doniak | Дата: Воскресенье, 19.04.2009, 17:24 | Сообщение # 117 |
Язык программированя: CodeVisionAVR Си
Зарегистрирован 19.03.2008
Группа: Модераторы
Сообщений: 584
Город: Кривой Рог (Днепропетровск)
Статус: Offline
| проводами соедени и всё
|
| |
| |
| Vern | Дата: Воскресенье, 19.04.2009, 20:03 | Сообщение # 118 |
Зарегистрирован 08.04.2009
Группа: Новички
Сообщений: 55
Город: Санкт-Петербург
Статус: Offline
| А блин точно спасибо
|
| |
| |
| kostikus | Дата: Воскресенье, 19.04.2009, 20:14 | Сообщение # 119 |
Зарегистрирован 26.03.2009
Группа: Новички
Сообщений: 5
Город: С-Петербург
Статус: Offline
| собрал схему.... все правильно вроде.... но распишите плиз мне на какой джампер что кидать нужно...
|
| |
| |
| sasha | Дата: Понедельник, 20.04.2009, 14:19 | Сообщение # 120 |
Язык программированя: Си и баском(учусь)
Зарегистрирован 16.02.2009
Группа: Новички
Сообщений: 371
Город: Актюбинск
Статус: Offline
| на J3 и J5 датчики И на J2 питание!
-=Наша_зависимость_от_роботов_возрастает_с_каждым_днем=-
|
| |
| |