|
Простой робот для начинающего без мк
|
|
| Space | Дата: Суббота, 14.06.2008, 10:03 | Сообщение # 1 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| О элементах сборки:
Микросхема L293D
Стабилизатор на 5 вольт
Диод 1N4004 -VD1
Конденсаторы:
по 0,1мкФ-7штук -C2, C3, C6, C7, C8, C9, C10
по 1000мкФ-1штука -С5
по 100мкФ-1штука -С1
по 47мкФ-1штука - С4
Светодиод зелёный -HL1
Резисторы:
360 Ом -R1
220 Ом - 6 штук -R2, R3, R4, R5, R6, R7
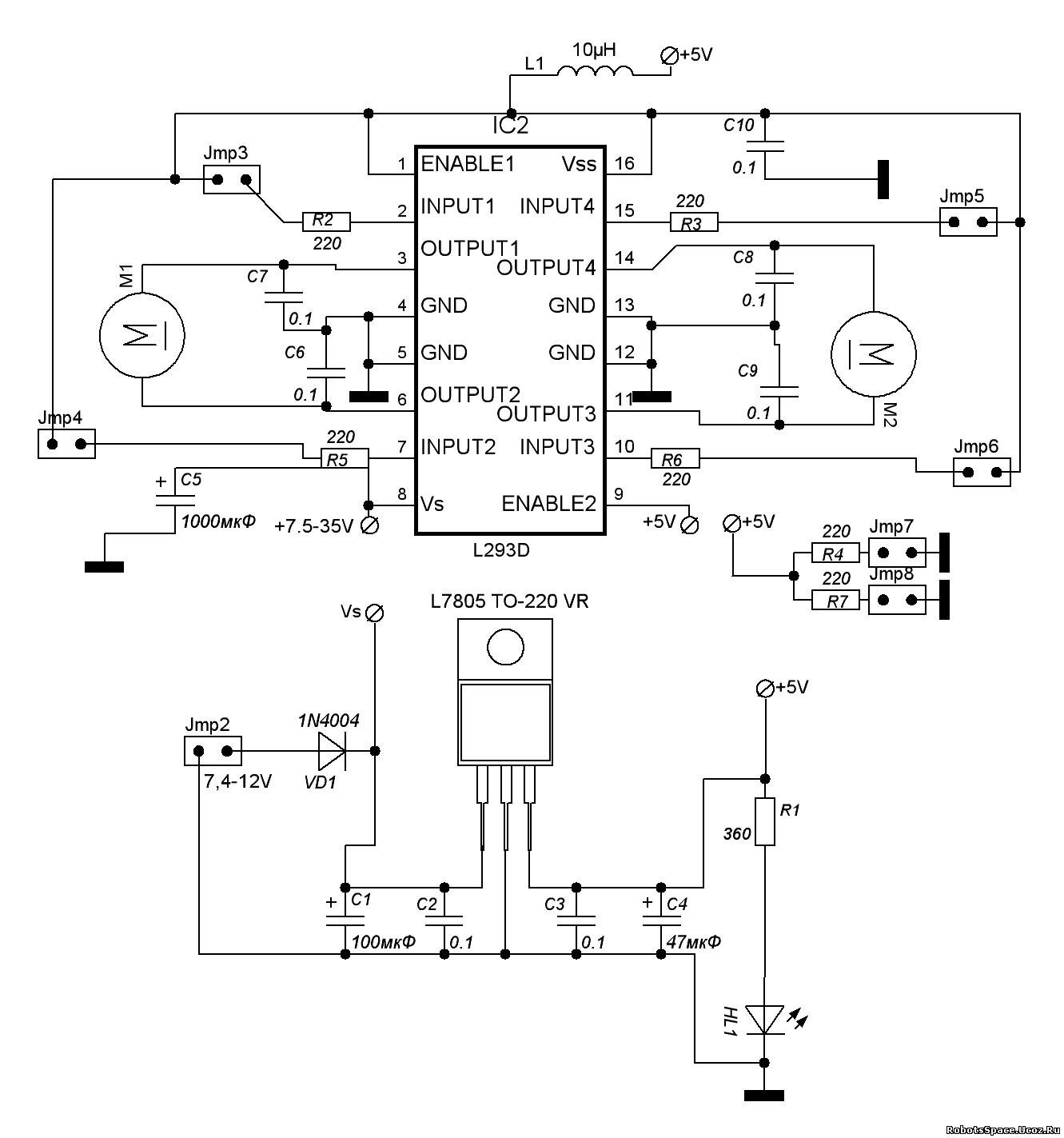
Дроссель 10мкГ -L1 Этот робот сделан специально для тех кто задаёт вопросы типа: "а можно ли сделать робота без мк?" или которые просто не хотят учить языков программирования, или они просто не могут этого сделать. Сдесь всего одна микросхема L293D, которую не надо программировать.  Кроме неё ещё несколько кондёров, резисторов, светодиод, диод, кренка, а какие именно увидете на принципиальной схеме. Кроме неё ещё несколько кондёров, резисторов, светодиод, диод, кренка, а какие именно увидете на принципиальной схеме.  Кстати вот она: Кстати вот она:
В принципе ни чего сложного. Подключая датчики на INPUT1(ножка 2) и INPUT4(ножка 15) ваш робот будет двигаться вперёд  , а подключая датчики(фотодиоды, фототранзисторы и др.) на INPUT2(ножка 7) и INPUT3(ножка 10) робот будет двигаться назад. Все эти контакты выведены на плате, а так же контакты под светодиоды, если ваш робот будет предназначен для движения по линии. , а подключая датчики(фотодиоды, фототранзисторы и др.) на INPUT2(ножка 7) и INPUT3(ножка 10) робот будет двигаться назад. Все эти контакты выведены на плате, а так же контакты под светодиоды, если ваш робот будет предназначен для движения по линии.  Только совет. Слишком крутые повороты не делайте т. к. это не мк, который можно настроить на любую дорожку. Только, если скорость будет низкой робот сможет чётко следовать по ней. На быстрой скорости это не прокатит. Только совет. Слишком крутые повороты не делайте т. к. это не мк, который можно настроить на любую дорожку. Только, если скорость будет низкой робот сможет чётко следовать по ней. На быстрой скорости это не прокатит.
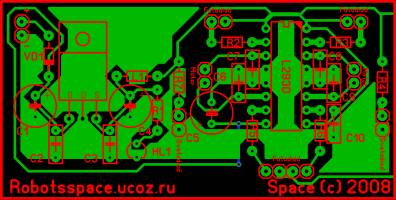
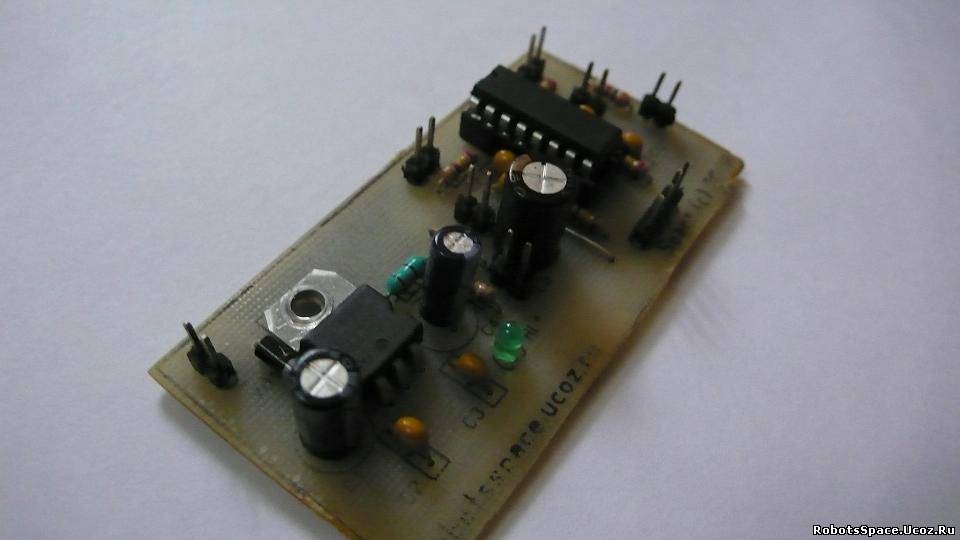
Сама плата как видете не большая. И в сборке будет интересна. Кренка стабилизирует напряжение до пяти вольт. Максимум на схему можно подать 12 вольт. На питание двигателей Vs максимум 35 вольт. Минимум 5. На саму микросхему Vss максимум 5 вольт. На разведённой плате это всё уже сделано. Всё конденсаторы установленные на плате позволяют чётко работать всей схеме снимая все помехи, которые могут возникнуть например от моторов. Теперь перейдём к монтажу. Я уже сделал эту плату, а вам пока это только предстоит, если конечно захотите.
 
Проверяя плату она показала стабильную работу. И после этого я её опробовал на 2 платформах. 1 это гусеницы:  На видео продемонстрирую как едит по линии: На видео продемонстрирую как едит по линии:
Кстати новичкам лучше купить сразу готовую платформу и именно с танковым приводом, ну или машинку которая может разворачиваться на месте. Но ещё можно купить 2 сервопривода. Но они обойдутся где-то в 600-800 рублей. А следующие видео и будет именно с сервоприводами. Робот будет ехать по линии и следовать за рукой. Он может также просто ехать на свет. После подборки светодиодов, то есть, какие лучше отражаются от белой поверхности. Было решено взять белые светодиоды. Так как с ними работают датчики на много лучше, чем с красными. Ну а теперь завершающих два видео. Плату и принципиальную схему скачивайте ниже. Если будут вопросы оброщайтесь.
Если кто соберёт, то смело выкладывайте внаши достижения
|
| |
| |
| sasha | Дата: Суббота, 11.04.2009, 19:13 | Сообщение # 91 |
Язык программированя: Си и баском(учусь)
Зарегистрирован 16.02.2009
Группа: Новички
Сообщений: 371
Город: Актюбинск
Статус: Offline
| выход (аут) от датчика подключаешь на инпут мк!
-=Наша_зависимость_от_роботов_возрастает_с_каждым_днем=-
|
| |
| |
| vlad | Дата: Суббота, 11.04.2009, 20:03 | Сообщение # 92 |
Зарегистрирован 05.04.2009
Группа: Новички
Сообщений: 11
Статус: Offline
| Выход Signal (J 1) идёт на Input 1 и Inpat 4 без разделения какими-либо элементами? + 5 (J) идёт на Enable 2?
Так правельно? Или по другому?
|
| |
| |
| sasha | Дата: Суббота, 11.04.2009, 20:10 | Сообщение # 93 |
Язык программированя: Си и баском(учусь)
Зарегистрирован 16.02.2009
Группа: Новички
Сообщений: 371
Город: Актюбинск
Статус: Offline
| у тя робот что делать должен?
-=Наша_зависимость_от_роботов_возрастает_с_каждым_днем=-
|
| |
| |
| Doniak | Дата: Суббота, 11.04.2009, 21:07 | Сообщение # 94 |
Язык программированя: CodeVisionAVR Си
Зарегистрирован 19.03.2008
Группа: Модераторы
Сообщений: 584
Город: Кривой Рог (Днепропетровск)
Статус: Offline
| Quote (vlad) + 5 (J) идёт на Enable 2?
везде где есть +5В (Enable2 Enable1 Vss) кроме Vs.
|
| |
| |
| vlad | Дата: Суббота, 11.04.2009, 21:38 | Сообщение # 95 |
Зарегистрирован 05.04.2009
Группа: Новички
Сообщений: 11
Статус: Offline
| робот отслеживает чёрную полосу (линию). Хочется чётко знать на какие выводы ставить датчик
|
| |
| |
| sasha | Дата: Суббота, 11.04.2009, 21:41 | Сообщение # 96 |
Язык программированя: Си и баском(учусь)
Зарегистрирован 16.02.2009
Группа: Новички
Сообщений: 371
Город: Актюбинск
Статус: Offline
| 1) вы должны спаять 2 датчика(который вы показали)
2) и аут с левого датчика на инпут1 а с правого на инпут 4!
кажется так!
-=Наша_зависимость_от_роботов_возрастает_с_каждым_днем=-
|
| |
| |
| vlad | Дата: Суббота, 11.04.2009, 22:11 | Сообщение # 97 |
Зарегистрирован 05.04.2009
Группа: Новички
Сообщений: 11
Статус: Offline
| У Admin робот имеет один по середине фототранзистор и два светодиода. Фототранзистор следует по чёрной линии, а светодиоды с двух сторон подсвечивают.
Предлагаемый вами вариант, наверно, не подойдёт, Почему молчит Admin?
|
| |
| |
| sasha | Дата: Суббота, 11.04.2009, 22:16 | Сообщение # 98 |
Язык программированя: Си и баском(учусь)
Зарегистрирован 16.02.2009
Группа: Новички
Сообщений: 371
Город: Актюбинск
Статус: Offline
| у него дела наверно!!! че трудно светодиоды и фототранзисторы на отдельный плате сделать???? как бампер с переди еще плату сделай и светодиоды поставь как хочешЬ!
-=Наша_зависимость_от_роботов_возрастает_с_каждым_днем=-
|
| |
| |
| vlad | Дата: Суббота, 11.04.2009, 23:04 | Сообщение # 99 |
Зарегистрирован 05.04.2009
Группа: Новички
Сообщений: 11
Статус: Offline
| если бы не нужно было именно с компаратором, я бы не писал на форуме!
|
| |
| |
| Space | Дата: Воскресенье, 12.04.2009, 00:13 | Сообщение # 100 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Quote (vlad) У Admin робот имеет один по середине фототранзистор и два светодиода. Фототранзистор следует по чёрной линии, а светодиоды с двух сторон подсвечивают.
Предлагаемый вами вариант, наверно, не подойдёт, Почему молчит Admin
Не один а три. Не фототранзистор, а фотодиод. Задействовано только 2 фотодиода. Светодиоды горят все потому что подключены параллельно на питание.
Для движения вперёд подключаем фотодиоды на Input1 и 4. Для движения в обратном направление Input2 и 3. Не надо подключать на все входы(Input1-Inpu4) фотодиоды. Работать не будет. Выбираем только один из вариантов. Либо Input1 и 4, либо Input2 и 3
|
| |
| |
| sasha | Дата: Воскресенье, 12.04.2009, 12:48 | Сообщение # 101 |
Язык программированя: Си и баском(учусь)
Зарегистрирован 16.02.2009
Группа: Новички
Сообщений: 371
Город: Актюбинск
Статус: Offline
| Quote (vlad) если бы не нужно было именно с компаратором, я бы не писал на форуме!
я те не говорил что без компораторов! просто светодиоды и фототранзисторы поставь на отдельный плате!!!!! и проволочкой на компоратор!!! а от компаратора на контроллер 
-=Наша_зависимость_от_роботов_возрастает_с_каждым_днем=-
|
| |
| |
| vlad | Дата: Воскресенье, 12.04.2009, 18:12 | Сообщение # 102 |
Зарегистрирован 05.04.2009
Группа: Новички
Сообщений: 11
Статус: Offline
| Здравствуйте.
Я уже понял про фотодиоды и светодиоды, меня интересует вопрос. Можно ли технически реализовать подключения одной платы из сайта http://robozone.su/page/5/ (Модуль сенсора определения линии на основе компаратора LM 311) к это плате (на основе L293D). И как технически это реализовать?
ПЛАТУ "Модуль сенсора определения линии на основе компаратора LM 311" знает Admin.
|
| |
| |
| Space | Дата: Воскресенье, 12.04.2009, 18:29 | Сообщение # 103 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Quote (vlad) Я уже понял про фотодиоды и светодиоды, меня интересует вопрос. Можно ли технически реализовать подключения одной платы из сайта http://robozone.su/page/5/ (Модуль сенсора определения линии на основе компаратора LM 311) к это плате (на основе L293D). И как технически это реализовать?
Можно, но не имеет смысла. Она используется в основном вместе с мк. На микросхеме можно и так всё оставить.
Но если надо, то подключаешь выход(SignaL) с модуля сенсора определения линии на основе компаратора LM311 к ножке микросхемы Input1-Iput4. Резистор в таком случае с микросхемы убираем (R2-R3, R5-R6).
|
| |
| |
| vlad | Дата: Воскресенье, 12.04.2009, 19:32 | Сообщение # 104 |
Зарегистрирован 05.04.2009
Группа: Новички
Сообщений: 11
Статус: Offline
| то есть Input 2-4 закарачиваем на Sugnal, а + 5 V с модуля подключаем к Enable 2 микросхемы L239D? Так правельно? Робот едит вперёд.
А он будет отключать-включать колесо при потере чёрной линии?
|
| |
| |
| Space | Дата: Воскресенье, 12.04.2009, 21:37 | Сообщение # 105 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Quote (vlad) то есть Input 2-4 закарачиваем на Sugnal
да
Quote (vlad) + 5 V с модуля подключаем к Enable 2 микросхемы L239D?
да
Quote (vlad) А он будет отключать-включать колесо при потере чёрной линии?
совсем будет отключать мотор когда нет сигнала, то есть фотодиод находится над чёрной линией и включать когда есть сигнал
И смотри всё на видео 1 и 2 там всё доступно и понятно! 
|
| |
| |