|
Простой робот для начинающего без мк
|
|
| Space | Дата: Суббота, 14.06.2008, 10:03 | Сообщение # 1 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| О элементах сборки:
Микросхема L293D
Стабилизатор на 5 вольт
Диод 1N4004 -VD1
Конденсаторы:
по 0,1мкФ-7штук -C2, C3, C6, C7, C8, C9, C10
по 1000мкФ-1штука -С5
по 100мкФ-1штука -С1
по 47мкФ-1штука - С4
Светодиод зелёный -HL1
Резисторы:
360 Ом -R1
220 Ом - 6 штук -R2, R3, R4, R5, R6, R7
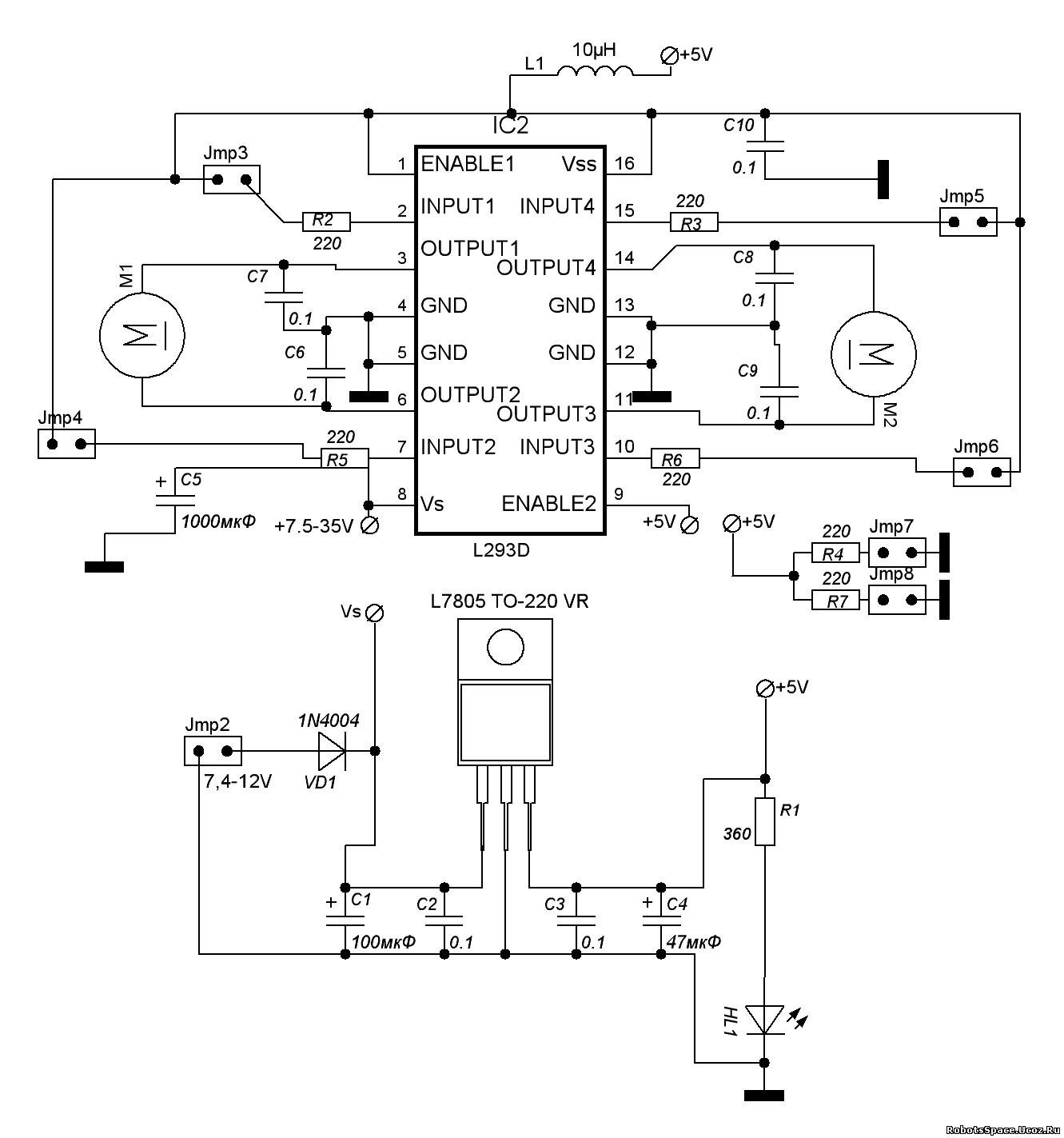
Дроссель 10мкГ -L1 Этот робот сделан специально для тех кто задаёт вопросы типа: "а можно ли сделать робота без мк?" или которые просто не хотят учить языков программирования, или они просто не могут этого сделать. Сдесь всего одна микросхема L293D, которую не надо программировать.  Кроме неё ещё несколько кондёров, резисторов, светодиод, диод, кренка, а какие именно увидете на принципиальной схеме. Кроме неё ещё несколько кондёров, резисторов, светодиод, диод, кренка, а какие именно увидете на принципиальной схеме.  Кстати вот она: Кстати вот она:
В принципе ни чего сложного. Подключая датчики на INPUT1(ножка 2) и INPUT4(ножка 15) ваш робот будет двигаться вперёд  , а подключая датчики(фотодиоды, фототранзисторы и др.) на INPUT2(ножка 7) и INPUT3(ножка 10) робот будет двигаться назад. Все эти контакты выведены на плате, а так же контакты под светодиоды, если ваш робот будет предназначен для движения по линии. , а подключая датчики(фотодиоды, фототранзисторы и др.) на INPUT2(ножка 7) и INPUT3(ножка 10) робот будет двигаться назад. Все эти контакты выведены на плате, а так же контакты под светодиоды, если ваш робот будет предназначен для движения по линии.  Только совет. Слишком крутые повороты не делайте т. к. это не мк, который можно настроить на любую дорожку. Только, если скорость будет низкой робот сможет чётко следовать по ней. На быстрой скорости это не прокатит. Только совет. Слишком крутые повороты не делайте т. к. это не мк, который можно настроить на любую дорожку. Только, если скорость будет низкой робот сможет чётко следовать по ней. На быстрой скорости это не прокатит.
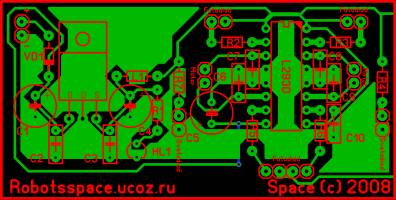
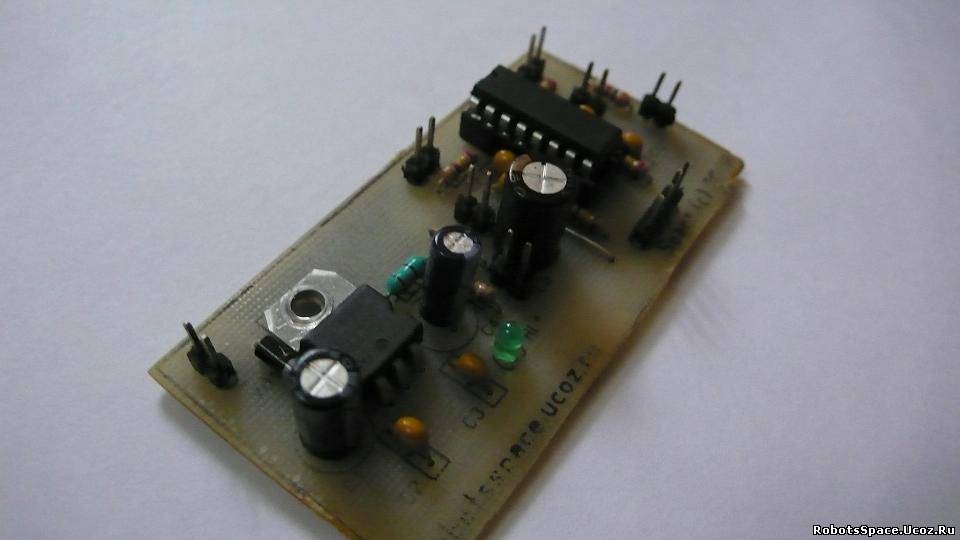
Сама плата как видете не большая. И в сборке будет интересна. Кренка стабилизирует напряжение до пяти вольт. Максимум на схему можно подать 12 вольт. На питание двигателей Vs максимум 35 вольт. Минимум 5. На саму микросхему Vss максимум 5 вольт. На разведённой плате это всё уже сделано. Всё конденсаторы установленные на плате позволяют чётко работать всей схеме снимая все помехи, которые могут возникнуть например от моторов. Теперь перейдём к монтажу. Я уже сделал эту плату, а вам пока это только предстоит, если конечно захотите.
 
Проверяя плату она показала стабильную работу. И после этого я её опробовал на 2 платформах. 1 это гусеницы:  На видео продемонстрирую как едит по линии: На видео продемонстрирую как едит по линии:
Кстати новичкам лучше купить сразу готовую платформу и именно с танковым приводом, ну или машинку которая может разворачиваться на месте. Но ещё можно купить 2 сервопривода. Но они обойдутся где-то в 600-800 рублей. А следующие видео и будет именно с сервоприводами. Робот будет ехать по линии и следовать за рукой. Он может также просто ехать на свет. После подборки светодиодов, то есть, какие лучше отражаются от белой поверхности. Было решено взять белые светодиоды. Так как с ними работают датчики на много лучше, чем с красными. Ну а теперь завершающих два видео. Плату и принципиальную схему скачивайте ниже. Если будут вопросы оброщайтесь.
Если кто соберёт, то смело выкладывайте внаши достижения
|
| |
| |
| Skyline | Дата: Суббота, 20.02.2010, 18:38 | Сообщение # 181 |
Зарегистрирован 20.02.2010
Группа: Новички
Сообщений: 50
Город: Уральск
Статус: Offline
| Quote (S-T-A-L-K-E-R) Quote (Skyline) Если не сложно сделайте фото обратной стороны платы. Заранее спасибо. -зачем ? Спасибо уже не надо, просто не совсем разобрался с подключением стабилизатора.
|
| |
| |
| S-T-A-L-K-E-R | Дата: Суббота, 20.02.2010, 20:13 | Сообщение # 182 |
Язык программированя: Мурманская область
Зарегистрирован 11.06.2009
Группа: Модераторы
Сообщений: 367
Город: Никель
Статус: Offline
| Quote (Skyline) просто не совсем разобрался с подключением стабилизатора.
- да, это та еще запарка ))
Я вот сегодня тоже эту плату делал, осталось только пара деталей и готово 
|
| |
| |
| юрии | Дата: Суббота, 20.02.2010, 20:17 | Сообщение # 183 |
Язык программированя: Васик
Зарегистрирован 05.03.2009
Группа: Новички
Сообщений: 572
Город: Югорск
Статус: Offline
| Даите мне детальки я соберу без проблем =)))
|
| |
| |
| Skyline | Дата: Суббота, 13.03.2010, 11:02 | Сообщение # 184 |
Зарегистрирован 20.02.2010
Группа: Новички
Сообщений: 50
Город: Уральск
Статус: Offline
| А стабилизатор ставить именно такой или любой на 5 вольт ?
И обязательно транзисторного типа?Добавлено (13.03.2010, 11:02)
---------------------------------------------
Я правильно понимаю, разводку платы зеркалить не нужно? Она уже готова для печати.
|
| |
| |
| Space | Дата: Суббота, 13.03.2010, 11:43 | Сообщение # 185 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Quote (Skyline) А стабилизатор ставить именно такой или любой на 5 вольт ?
И обязательно транзисторного типа?
любой лиж бы выдавал 5 вольт.
Quote (Skyline) Я правильно понимаю, разводку платы зеркалить не нужно? Она уже готова для печати.
правильно понимаешь
|
| |
| |
| юрии | Дата: Суббота, 13.03.2010, 11:53 | Сообщение # 186 |
Язык программированя: Васик
Зарегистрирован 05.03.2009
Группа: Новички
Сообщений: 572
Город: Югорск
Статус: Offline
| Quote (Skyline) Я правильно понимаю, разводку платы зеркалить не нужно? Она уже готова для печати.
Зеркальть токо текст! Я один раз отзеркалил плату и пришлось все делать шиворот на выворот
|
| |
| |
| Skyline | Дата: Суббота, 20.03.2010, 08:45 | Сообщение # 187 |
Зарегистрирован 20.02.2010
Группа: Новички
Сообщений: 50
Город: Уральск
Статус: Offline
| http://myrobot.ru/stepbystep/el_simple_robot.php
В беседе Бибота и Бобота, говорится что если подтянуть INPUT1 и INPUT 4 подтягивающими резисторами к земле, то микросхема L293DNE работает как L293D. Можно ли это применить в этой схеме?
|
| |
| |
| Dimsan | Дата: Суббота, 20.03.2010, 13:44 | Сообщение # 188 |
Язык программированя: Си, Делфи
Зарегистрирован 18.06.2009
Группа: Опытные
Сообщений: 252
Город: Херсон
Статус: Offline
| Можно.
|
| |
| |
| Skyline | Дата: Суббота, 20.03.2010, 19:35 | Сообщение # 189 |
Зарегистрирован 20.02.2010
Группа: Новички
Сообщений: 50
Город: Уральск
Статус: Offline
| А где на плате их удобней разместить?
|
| |
| |
| Dimsan | Дата: Суббота, 20.03.2010, 20:31 | Сообщение # 190 |
Язык программированя: Си, Делфи
Зарегистрирован 18.06.2009
Группа: Опытные
Сообщений: 252
Город: Херсон
Статус: Offline
| Ну как где? Где тебе удобней. Если плата уже разведена, то сверху допаяй и всё.
Сообщение отредактировал Dimsan - Суббота, 20.03.2010, 20:34 |
| |
| |
| Skyline | Дата: Понедельник, 22.03.2010, 20:42 | Сообщение # 191 |
Зарегистрирован 20.02.2010
Группа: Новички
Сообщений: 50
Город: Уральск
Статус: Offline
| Quote (Dimsan) Ну как где? Где тебе удобней. Если плата уже разведена, то сверху допаяй и всё.
Понятно, спасибо. Добавлено (22.03.2010, 20:42)
---------------------------------------------
Я так понимаю чтобы сделать робота объезжающего препятствия нужно добавить например вот этот ик-бампер:
http://myrobot.ru/wiki/index.php?n=Projects.MyTSOPerTuning
Но что то не совсем разберусь, что куда подключать, то есть на плате с L293D будут задействованы INPUT1 и INPUT4, а на бампере OUT1 и OUT2, GND тогда получается общая? Или я че то туплю?
Сообщение отредактировал Skyline - Вторник, 23.03.2010, 13:35 |
| |
| |
| Dimsan | Дата: Вторник, 23.03.2010, 19:31 | Сообщение # 192 |
Язык программированя: Си, Делфи
Зарегистрирован 18.06.2009
Группа: Опытные
Сообщений: 252
Город: Херсон
Статус: Offline
| GND - ground - земля - в данных схемах минус питания. Для двух схем, если они как-то обмениваются сигналами, "земля" должная быть общая.
|
| |
| |
| Skyline | Дата: Среда, 24.03.2010, 20:47 | Сообщение # 193 |
Зарегистрирован 20.02.2010
Группа: Новички
Сообщений: 50
Город: Уральск
Статус: Offline
| Ну я и говорю что OUT1 и OUT2 отдельно, а GND общая. Первые два разъема питание, а остальные на подачу сигнала.
Сообщение отредактировал Skyline - Суббота, 27.03.2010, 09:50 |
| |
| |