| Важно!!! |
Для успешного просмотра
сайта воспользуйтесь
браузером Mozilla Firefox

|
 |
| Мини-Профиль |
Гость

Группа: Гости
Время:16:29
Гость, мы рады вас видеть. Пожалуйста зарегистрируйтесь или авторизуйтесь!
|
|
| Категории раздела |
|
Программирование [14]
Изучаем программирование вместе. На ваш выбор предоставляется два варианта: * Bascom AVR (Basic) - рекомендую :) * CodeVision AVR (Си) - тоже не плохо
|
|
Электроника [19]
Готовые платы, принципиальные схемы. Другими словами, собираем электронику для робота.
|
|
Механика [3]
Шестерни, сервоприводы, активаторы, колёса и т. д.
|
|
Делимся опытом [6]
статьи о способах изготовления плат, методах монтажа/демонтажа компонентов и т.д
|
|
|
| Поиск |
|
|
| Наш опрос |
|
|
| Статистика |
|
|
| | Помоги сайту |  |
|
Всего материалов в каталоге: 38
Показано материалов: 1-3 |
Страницы: 1 2 3 ... 12 13 » |
Очень часто на всевозможных форумах или сайтах посвящённых робототехники можно встретить такой вопрос: как сделать робота из подручных материалов? По таким вопросам сразу понятно, что человек, который их задаёт новичок и мало, что смыслит в робототехники. Но как ни странно из подручных материалов МОЖНО сделать робота...нужно только смекалку проявить. |
Для преобразования сигнала с дальномера Sharp необходимо использовать аналого-цифровой преобразователь. Рассмотрим программный пример работы с АЦП микроконтроллера atmega16, реализованный средствами компилятора CodeVision AVR.
|
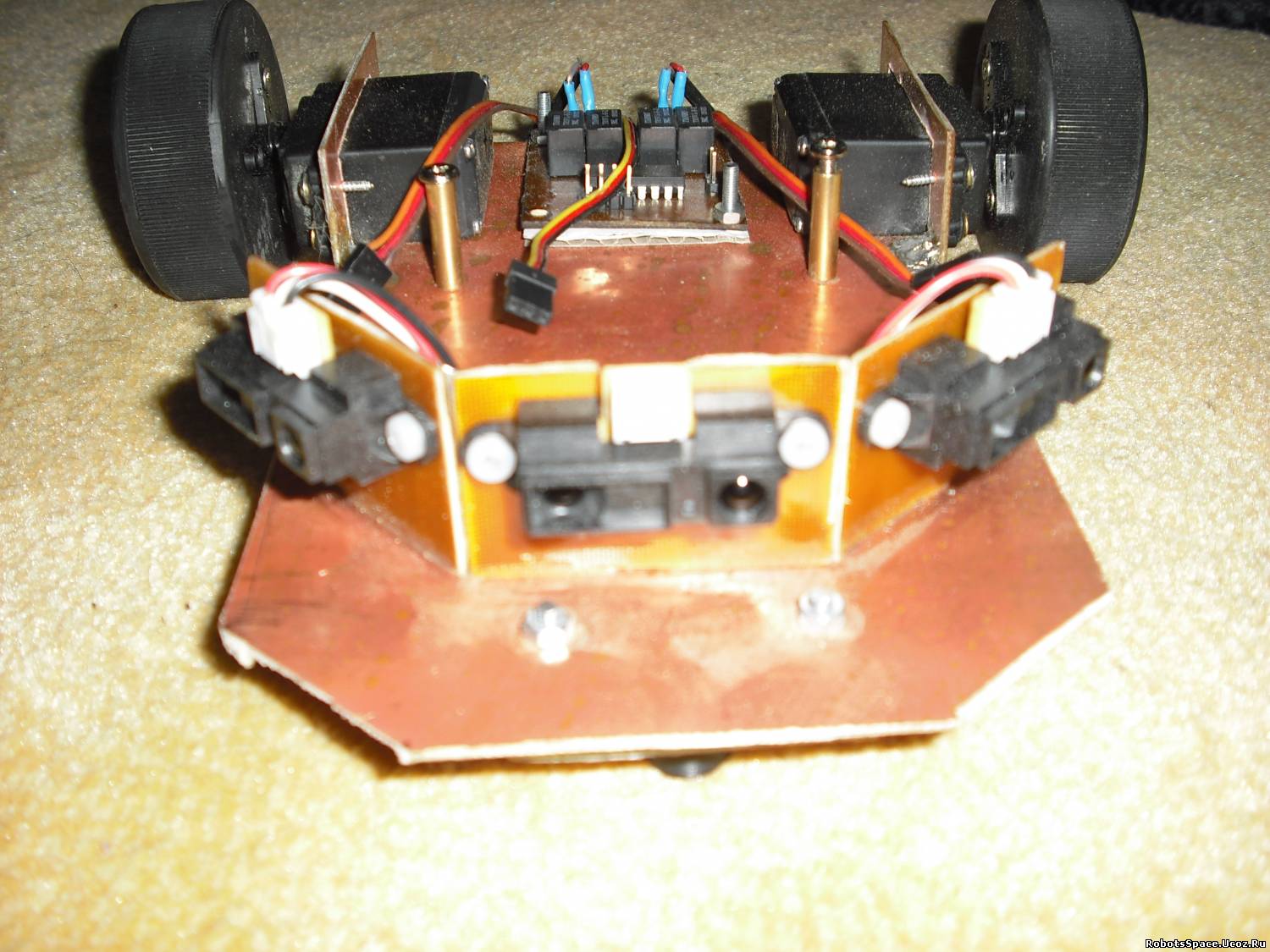
И так первая задача при постройке робота это сделать более или менее
нормальную платформу, на которой должно уместиться как минимум сервы,
драйвер двигателей, несколько датчиков, контроллер и аккумулятор
небольшого размера(например литьевый). На ней можно будет проводить все
тесты написанной программы. В дальнейшем можно будет сварганить более
совершенную платформу, а то и целый корпус.
Из чего сделать? Есть несколько вариантов: |
|
|

 roboforum
roboforum
 Просмотров: 19925 |
Просмотров: 19925 |

 Добавил:
Добавил:  Дата:
Дата: