|
Проект "Kapanda"
|
|
| Doniak | Дата: Суббота, 17.10.2009, 21:26 | Сообщение # 16 |
Язык программированя: CodeVisionAVR Си
Зарегистрирован 19.03.2008
Группа: Модераторы
Сообщений: 584
Город: Кривой Рог (Днепропетровск)
Статус: Offline
| здорова получилось :)
|
| |
| |
| pashteet | Дата: Воскресенье, 18.10.2009, 20:22 | Сообщение # 17 |
Зарегистрирован 21.09.2009
Группа: Новички
Сообщений: 225
Город: Волжский
Статус: Offline
| Спасибо  Добавлено (18.10.2009, 20:22)
---------------------------------------------
Прикрутил ТСОП, теперь можно управлять с пульта!  Очень нравится! Все расценивают как "умную" игрушку Очень нравится! Все расценивают как "умную" игрушку 
|
| |
| |
| pashteet | Дата: Воскресенье, 18.10.2009, 20:31 | Сообщение # 18 |
Зарегистрирован 21.09.2009
Группа: Новички
Сообщений: 225
Город: Волжский
Статус: Offline
| Ну и как пологается - аттачи:


Фото "доработанного" MRC-40Добавлено (18.10.2009, 20:31)
---------------------------------------------
П.С. Видео будет завтра, сегодня у дочки День Рождения
|
| |
| |
| юрии | Дата: Воскресенье, 18.10.2009, 20:44 | Сообщение # 19 |
Язык программированя: Васик
Зарегистрирован 05.03.2009
Группа: Новички
Сообщений: 572
Город: Югорск
Статус: Offline
| Quote (pashteet) у дочки День Рождения
 поздравляю поздравляю
Сообщение отредактировал юрии - Воскресенье, 18.10.2009, 20:45 |
| |
| |
| Space | Дата: Воскресенье, 18.10.2009, 21:14 | Сообщение # 20 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Quote (pashteet) у дочки День Рождения
Это замечательно, поздравляю! 
Пробовал тоже играться с ик-управлением, но заработало только на тиньке 2313, а таже прога на меге не хотела работать. Точней она работало, но оооочень заторможено, ощущение было что там задержка стоит в секунд 5 не меньше. Скинь потом саму прогу и напиши какие фьюзы прошивал.
|
| |
| |
| pashteet | Дата: Воскресенье, 18.10.2009, 21:53 | Сообщение # 21 |
Зарегистрирован 21.09.2009
Группа: Новички
Сообщений: 225
Город: Волжский
Статус: Offline
| Quote (Space) Пробовал тоже играться с ик-управлением, но заработало только на тиньке 2313, а таже прога на меге не хотела работать. Точней она работало, но оооочень заторможено, ощущение было что там задержка стоит в секунд 5 не меньше. Скинь потом саму прогу и напиши какие фьюзы прошивал.
Я смотрел твою тему на робофоруме!
Нашел элементарную ошибку - кондеры на кварц! Тинька заводит кварц на 16 при кондерах в 30пФ, а мега -нет! только при 22пФ 
Так что если ты кондеры не перипаивал в схеме, то она врятли бы заработала 
Сейчас организовано управление 9-ю командами (вперед, вперед вправо, вперед влево, назад, назад вправо, назад влево, стоп, разворот вправо, разворот влево) Завтра буду мутить управление скоростью и еще что-нибудь придумаю
|
| |
| |
| Space | Дата: Воскресенье, 18.10.2009, 21:59 | Сообщение # 22 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| На на меге у меня и стояли кондёры в 22пФ, да и на тиньке тоже.
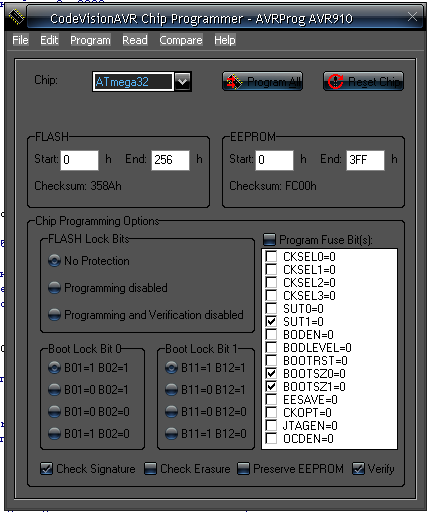
Ты скажи что за фьюзы прошивал. По фото смотрел кварц вроде на 8 стоит.
|
| |
| |
| pashteet | Дата: Воскресенье, 18.10.2009, 22:16 | Сообщение # 23 |
Зарегистрирован 21.09.2009
Группа: Новички
Сообщений: 225
Город: Волжский
Статус: Offline
| Да кварц на 8МГц, какраз завтра решил перепаять на 16
Фьюзы такие:
 Добавлено (18.10.2009, 22:16)
---------------------------------------------
Code $regfile = "m32def.dat" 'используем мк ATmega32
$crystal = 8000000 'частота кварцевого резонатора 8MHz
$lib "mcsbyte.lbx"
Config Rc5 = Pinb.3
Config Pinb.0 = Output : Led1 Alias Portb.0 'ногу сконфигурировали как выход и обозвали Led1
Config Pinb.2 = Output : Led2 Alias Portb.2 'ногу сконфигурировали как выход и обозвали Led2
Config Timer1 = Pwm , Pwm = 8 , Prescale = 1 , Compare A Pwm = Clear Down , Compare B Pwm = Clear Down ' таймер для ШИМ двигателей
Config Pind.6 = Output : Dr1 Alias Portd.6 'ногу сконфигурировали как выход и обозвали Dr1
Config Pind.7 = Output : Dr2 Alias Portd.7 'ногу сконфигурировали как выход и обозвали Dr2
Config Pind.5 = Output 'ногу ШИМа 1-ого движка сконфигурировали как выход
Config Pind.4 = Output 'ногу ШИМа 2-ого движка сконфигурировали как выход
Dim Address As Byte , Command As Byte
Dim Speed As Integer
Enable Interrupts ' разрешаем прерывания
Do
Getrc5(address , Command)
If Address <> 255 And Command <> 255 Then
Command = Command And &B01111111
End If
If Command = 5 Then : Reset Led1
Gosub Стоп
Elseif Command = 2 Then : Set Led1
Gosub Вперёд
Waitms 100
Elseif Command = 8 Then
Gosub Назад
Waitms 100
Elseif Command = 4 Then
Gosub Разворот_влево
Waitms 100
Elseif Command = 6 Then
Gosub Разворот_вправо
Waitms 100
Elseif Command = 3 Then
Gosub Вперёд_вправо
Waitms 100
Elseif Command = 1 Then
Gosub Вперёд_влево
Waitms 100
Elseif Command = 7 Then
Gosub Назад_влево
Waitms 100
Elseif Command = 9 Then
Gosub Назад_вправо
Waitms 100
End If
Loop
Извини, что без коментариев, делал на скорую руку
|
| |
| |
| Space | Дата: Воскресенье, 18.10.2009, 22:48 | Сообщение # 24 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| комментарии не требуются и так всё понятно 
|
| |
| |
| pashteet | Дата: Понедельник, 19.10.2009, 15:32 | Сообщение # 25 |
Зарегистрирован 21.09.2009
Группа: Новички
Сообщений: 225
Город: Волжский
Статус: Offline
| Ребят, что означает ошибка: Duplicate label?
|
| |
| |
| Space | Дата: Понедельник, 19.10.2009, 15:55 | Сообщение # 26 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Ну сам по суди, если перевести, то получается так: повторяющаяся метка. Значит в проге 2 одинаковые метки вот и ошибку выдаёт
|
| |
| |
| danger | Дата: Понедельник, 19.10.2009, 19:39 | Сообщение # 27 |
Язык программированя: пока нет
Зарегистрирован 17.07.2009
Группа: Новички
Сообщений: 168
Город: Чебоксары
Статус: Offline
| http://roboforum.ru/wiki/Файл:MBTT.jpg а это твой бот был?
http://vkontakte.ru/club13643816 тыркни по ссылке
|
| |
| |
| юрии | Дата: Понедельник, 19.10.2009, 19:42 | Сообщение # 28 |
Язык программированя: Васик
Зарегистрирован 05.03.2009
Группа: Новички
Сообщений: 572
Город: Югорск
Статус: Offline
| этот робот SkyStorm'а
|
| |
| |
| pashteet | Дата: Среда, 21.10.2009, 20:19 | Сообщение # 29 |
Зарегистрирован 21.09.2009
Группа: Новички
Сообщений: 225
Город: Волжский
Статус: Offline
| Нет, это Костин робот, но шасси одинаковые (если чесно, я у него подсмотрел  ) )
Кирилл, спасибо за разъяснения! Сейчас еще раз посмотрю код, можт че просматрел Добавлено (19.10.2009, 23:03)
---------------------------------------------
Блин, ребят, кому не сложно посмотрите код, плиз! Я уже всю голову сломал, че иму не нравится 
Я недавно начал писать и многих операторов еще не знаю, можт я где накосячил Code
'******************** Проект Капанда ******************************************
'******************** Гусеничный робот *****************************************
'******************* С АТмега32 на борту ***************************************
'************* частота системного кварца 8 МГц *********************************
'************ возможность расширения функционала *******************************
'*********** Котроллер собран на платформе MRC-40 ******************************
'*** Благодарности: ************************************************************
'**** Setar, SkayStorm, FireFly, Spase, DeaD ***********************************
'*******************************************************************************
$regfile = "m32def.dat" 'используем мк ATmega32
$crystal = 8000000 'частота кварцевого резонатора 8MHz
'****************************Подключаемые библиотеки****************************
$lib "mcsbyte.lbx" ' Библиотека для использования протокола RC5
'$lib "lcd4.lbx" 'используем 4-х битное подключение дисплея с помощью альтернативной библиотеки
'Cursor Off : Cls 'отключаем курсор и очищаем дисплей
'****************************Настройка таймеров и сервоприводов*****************
Config Timer1 = Pwm , Pwm = 8 , Prescale = 1 , Compare A Pwm = Clear Down , Compare B Pwm = Clear Down ' таймер для ШИМ двигателей
Config Servos = 1 , Servo1 = Portc.2 , Reload = 12 ' Указываем кол-во серв, присваеваем имя Servo1 порту PC2, указываем длину импульса.
'*************************** Порт A ********************************************
' PortA.0 - Левый нижний
' PortA.1 - Правый нижний
' PortA.2 - Левый верхний
' PortA.3 - Правый верхний
' Поключили дальномер, порт A7, настройки АДС ниже
'*************************** Порт В ********************************************
'Библиотека lcd4.lbx использует следующее подключение:
'Config Lcdpin = Pin , Rs = Portb.0 , E = Portb.2 , Db4 = Portb.4 , Db5 = Portb.5 , Db6 = Portb.6 , Db7 = Portb.7
'Config Lcd = 16 * 2 'используем дисплей на 2 строчки по 16 знакомест в каждой
Config Rc5 = Pinb.3
Config Pinb.0 = Output : Led1 Alias Portb.0 'ногу сконфигурировали как выход и обозвали Led1
Config Pinb.2 = Output : Led2 Alias Portb.2 'ногу сконфигурировали как выход и обозвали Led2
Config Pinb.1 = Output : Led3 Alias Portb.1 'ногу сконфигурировали как выход и обозвали Led2
'*************************** Порт C ********************************************
Config Pinc.2 = Output ' Подключили серву1 к порту С2, настройки сервы выше
'*************************** Порт D ********************************************
Config Pind.6 = Output : Dr1 Alias Portd.6 'ногу сконфигурировали как выход и обозвали Dr1
Config Pind.7 = Output : Dr2 Alias Portd.7 'ногу сконфигурировали как выход и обозвали Dr2
Config Pind.5 = Output 'ногу ШИМа 1-ого движка сконфигурировали как выход
Config Pind.4 = Output 'ногу ШИМа 2-ого движка сконфигурировали как выход
' PortD.0 - RXD
' PortD.1 - TXD
' Свободные порты: PortD.2 - PortD.3
'*****************************Настройка ADC*************************************
Config Adc = Single , Prescaler = Auto , Reference = Internal
'*******************************************************************************
Enable Interrupts ' разрешаем прерывания
'************************Переменные и константы*********************************
Dim Address As Byte , Command As Byte
Dim Speed As Integer , Sharp As Integer , Lv As Integer , Pv As Integer , Ln As Integer , Pn As Integer
Dim I As Integer , P As Integer , G As Integer
Dim Vout As Word
Dim A As Byte
Speed = 155
A = 1
'*****************************Основной цикл*************************************
'Do
While A > 0 ' ждем команды с пульта и переходим к соответствующей программе
Getrc5(address , Command)
If Address <> 255 And Command <> 255 Then
Command = Command And &B01111111
End If
If Command = 1 Then : P = 1 : Waitms 100 : Gosub 1 ' Самостоятельное движение с объездом препядствий и использованием датчиков поверхности
Elseif Command = 2 Then : P = 2 : Waitms 100 : Gosub 2 ' Самостоятельное движение с объездом препядствий без использованием датчиков поверхности
Elseif Command = 3 Then : P = 3 : Waitms 100 : Gosub 3 ' Прием команд и управление с пульта
End If
Wend
1:
' P = 1
Gosub Вперёд ' Если сигнала от ик-датчика(Sharp) не поступает, значит двигаемся всё время прямо
'******************Вращение сервопривода и датчика Sharp************************
For I = 45 To 90 Step 1 ' Вращаем сервой справа на лево
Gosub Sharp_right ' считаем что шарп смотрит вправо
Servo(1) = I
Gosub Датчики ' проверяем датчики пов-ти
Next
For I = 90 To 135 Step 1 ' Вращаем сервой справа на лево
Gosub Sharp_left ' считаем что шарп смотрит влево
Servo(1) = I
Gosub Датчики ' проверяем датчики пов-ти
Next
For I = 135 To 90 Step -1 ' Вращаем сервой слева на право
Gosub Sharp_left ' считаем что шарп смотрит вправо
Servo(1) = I
Gosub Датчики ' проверяем датчики пов-ти
Next
For I = 90 To 45 Step -1 ' Вращаем сервой слева на право
Gosub Sharp_right ' считаем что шарп смотрит влево
Servo(1) = I
Gosub Датчики ' проверяем датчики пов-ти
Next
Gosub 1
2:
' P = 2
Gosub Вперёд ' Если сигнала от ик-датчика(Sharp) не поступает, значит двигаемся всё время прямо
'******************Вращение сервопривода и датчика Sharp************************
For I = 45 To 90 Step 1 ' Вращаем сервой справа на лево
Gosub Sharp_right ' считаем что шарп смотрит вправо
Servo(1) = I
Waitms 12
Next
For I = 90 To 135 Step 1 ' Вращаем сервой справа на лево
Gosub Sharp_left ' считаем что шарп смотрит влево
Servo(1) = I
Waitms 12
Next
For I = 135 To 90 Step -1 ' Вращаем сервой слева на право
Gosub Sharp_left ' считаем что шарп смотрит вправо
Servo(1) = I
Waitms 12
Next
For I = 90 To 45 Step -1 ' Вращаем сервой слева на право
Gosub Sharp_right ' считаем что шарп смотрит влево
Servo(1) = I
Waitms 12
Next
Gosub 2
3:
' P = 3
Getrc5(address , Command)
If Address <> 255 And Command <> 255 Then
Command = Command And &B01111111
End If
If Command = 5 Then : Reset Led1
Gosub Стоп
Elseif Command = 2 Then : Set Led1
Gosub Вперёд
Waitms 100
Elseif Command = 8 Then : Set Led1
Gosub Назад
Waitms 100
Elseif Command = 4 Then : Set Led1
Gosub Разворот_влево
Waitms 100
Elseif Command = 6 Then : Set Led1
Gosub Разворот_вправо
Waitms 100
Elseif Command = 3 Then : Set Led1
Gosub Вперёд_вправо
Waitms 100
Elseif Command = 1 Then : Set Led1
Gosub Вперёд_влево
Waitms 100
Elseif Command = 7 Then : Set Led1
Gosub Назад_влево
Waitms 100
Elseif Command = 9 Then : Set Led1
Gosub Назад_вправо
Waitms 100
Elseif Command = 16 Then : Set Led2 : Waitms 100 : Reset Led2
Speed = Speed + 5
Waitms 100
Elseif Command = 17 Then : Set Led2 : Waitms 100 : Reset Led2
Speed = Speed - 5
Waitms 100
End If
Gosub 3
'Loop
'*******************************************************************************
' Включение комбинации моторов для движения в заданном направлении
'*******************************************************************************
Стоп: ' стоим на месте
Dr1 = 0 : Dr2 = 0 : Pwm1a = 0 : Pwm1b = 0
Return
Вперёд: ' едим вперёд на заданной скорости
Dr1 = 0 : Dr2 = 0 : Pwm1a = Speed : Pwm1b = Speed
Return
Вперёд_вправо: ' поварачиваем вправо на заданной скорости
Dr1 = 0 : Dr2 = 0 : Pwm1a = Speed : Pwm1b = 0
Return
Вперёд_влево: ' поворачиваем влево на заданной скорости
Dr1 = 0 : Dr2 = 0 : Pwm1a = 0 : Pwm1b = Speed
Return
Назад: ' едим назад на заданной скорости
Dr1 = 1 : Dr2 = 1 : Pwm1a = Speed : Pwm1b = Speed
Return
Назад_вправо: ' поворачиваем назад-вправо на заданной скорости ' едим вперёд на заданной скорости
Dr1 = 1 : Dr2 = 1 : Pwm1a = Speed : Pwm1b = 0
Return
Назад_влево: ' поворачиваем назад-влево на заданной скорости ' едим вперёд на заданной скорости
Dr1 = 1 : Dr2 = 1 : Pwm1a = 0 : Pwm1b = Speed
Return
Разворот_вправо: ' делаем Разворот_вправо на заданной скорости
Dr1 = 0 : Dr2 = 1 : Pwm1a = Speed : Pwm1b = Speed
Return
Разворот_влево: ' делаем Разворот_влево на заданной скорости
Dr1 = 1 : Dr2 = 0 : Pwm1a = Speed : Pwm1b = Speed
Return
'*******************************************************************************
' Проверка датчиков поверхности
'*******************************************************************************
Левый_верхний:
Config Porta.2 = Output : Set Porta.2 : Waitms 3
Config Porta.2 = Input : Reset Porta.2 : Waitms 3
If Pina.2 = 1 Then : Lv = 0 : Else : Lv = 1 : End If
Return
Левый_нижний:
Config Porta.0 = Output : Set Porta.0 : Waitms 3
Config Porta.0 = Input : Reset Porta.0 : Waitms 3
If Pina.0 = 1 Then : Ln = 0 : Else : Ln = 1 : End If
Return
Правый_верхний:
Config Porta.3 = Output : Set Porta.3 : Waitms 3
Config Porta.3 = Input : Reset Porta.3 : Waitms 3
If Pina.3 = 1 Then : Pv = 0 : Else : Pv = 1 : End If
Return
Правый_нижний:
Config Porta.1 = Output : Set Porta.1 : Waitms 3
Config Porta.1 = Input : Reset Porta.1 : Waitms 3
If Pina.1 = 1 Then : Pn = 0 : Else : Pn = 1 : End If
Return
'*******************************************************************************
' Анализ поверхности стола
'*******************************************************************************
Датчики:
' Gosub Подъем
If Lv = 0 Then
Set Led1 ' если обрыв слева то
For G = 1 To 6 ' цикл отъезда от края стола
Gosub Левый_нижний : Gosub Правый_нижний ' проверяем задние датчики
If Ln = 0 Or Pn = 0 Then : Reset Led1 : Gosub Вперёд : Return ' если сработали задние датчики то прекращаем отъезд, трогаемся вперед и возвращаемся в цикл
Else : Gosub Назад_влево : Waitms 300 : Gosub Вперёд ' если датчики не сработали то продолжаем отъезд
End If
Next
End If
If Pv = 0 Then
Set Led2 ' все тоже самое для правой сороны
For G = 1 To 6
Gosub Левый_нижний : Gosub Правый_нижний
If Ln = 0 Or Pn = 0 Then : Reset Led2 : Gosub Вперёд : Return
Else : Gosub Назад_вправо : Waitms 300 : Gosub Вперёд
End If
Next
End If
Reset Led1
Reset Led2
Return
'Подъем:
' Gosub Левый_верхний ' анализ "на подъем"
' Gosub Левый_нижний
' Gosub Правый_верхний
' Gosub Правый_нижний
' If Pv = 0 And Ln = 0 Or Pn = 0 And Lv = 0 Then ' проверяем на полу мы или уже в воздухе
' Gosub Стоп : Waitms 3000 ' если в воздухе то останавливаемся
' Else : Return
' End If
'Gosub 2
'***********************************Sharp***************************************
Sharp_right:
Do
Start Adc : Vout = Getadc(7) 'Sharp connected for example to PA=0(ADC0)
If Vout > 240 Then : Led3 = 1 : Gosub Разворот_влево : End If : Loop Until Vout < 240 : Led3 = 0 : Gosub Вперёд
Return
Sharp_left:
Do
Start Adc : Vout = Getadc(7) 'Sharp connected for example to PA=0(ADC0)
If Vout > 240 Then : Led3 = 1 : Gosub Разворот_вправо : End If : Loop Until Vout < 240 : Led3 = 0 : Gosub Вперёд
Return
End
'*******************************************************************************
Добавлено (21.10.2009, 15:51)
---------------------------------------------
Фух, освоил работу прерываний, жизнь становится приятнее Добавлено (21.10.2009, 20:19)
---------------------------------------------
Space! Подскажи плиз, или носом ткни, как на Васике софтварно рулить сервами? А то я серву на таймер2 вешаю, а она не крутится 
Впечатление такое, что нету Таймера2 у меня в меге
|
| |
| |
| Space | Дата: Среда, 21.10.2009, 20:45 | Сообщение # 30 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| я тебе уже писал как можно попробовать ошибку вычислить. Ещё лучше, если ты раскидаешь код программы по отдельным файлам как я делал. Так он тебе хотя бы укажет в каком из файлов ошибка. Quote (pashteet) Подскажи плиз, или носом ткни, как на Васике софтварно рулить сервами?
как-как её рулить??????????? 
|
| |
| |
|