|
"Robbe"
|
|
| Space | Дата: Воскресенье, 20.09.2009, 19:24 | Сообщение # 1 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
|
В самом низу сообщения, исходники в архиве Robbe Version 1.1.....
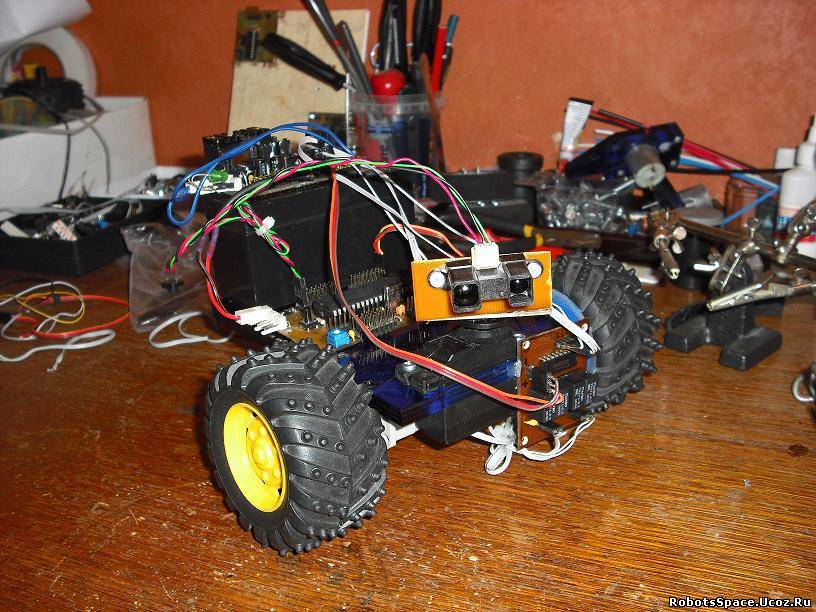
И так этот проект был задуман уже давно. Но начал я его с тех пор как стал воять отдельные модули+приобрёл шарп (робо-контроллер, блок стабилизированного напряжения, драйвер двигателей(микросхема, реле)и это не всё. Есть ещё готовые модули, а не котрые пока только в моих фантазиях ))) ). Если порыскать на форуме, то можно найти не сколько тем, которые имеют прямое отношение к моему проекту. Например: Драйвер двигателей на реле, Будующий корпус, ИК-дальномер Sharp GP2Y0A02 (20-120см)
Основные модули готовы, да и время на выходных появилось свободное. Вот и занялся на конец то. О целях проекта...
- 1. Сделать корпус из ПВХ
- 2. Научить объезжать препятствия благодаря Шарпу
- 3. Контроль разряда акб
- 4. Забобахать ОС для Robbe.
- 5. Научить работать с флешкой(использовать в качестве хранения памяти).
- 6. Возможно сделать 4 колёсную платформу в дальнейшем, но врятле.
- 7. Добавить звуковых датчиков(микрофоны, динамики)
- 8. Добавить контактные бамперы. Ведь если откажут основные датчики, то бамперы это единственное с помощью чего робот не будет потерянным.
- 9. Написать программу для управления Robbe с компьютера по Bluetooth.
- 10. Написать удобную терминальную программу(с помощью delphi) для управления робби как по Bluetooth так и по Uart. Причём сделать всякие дополнительные табл. с выводом разных данных. Например Акб, температура среды, экран для обработки видео с робби и т.д.
Что из этого уже начал. А начал я со второго пункта. Так как ПВХ пока не купил. Ну собственно результаты есть. Хотя не совсем устраивают. Над программой надо работать ещё. Бывают глюки с задержками. Например повороты дольше чем надо длятся. Для любопытных  : :
Основа:
Code '*******************************************************************************
' Автор: Кирилл Игоревич (Space)
' Сайт: www.robptsspace.ucoz.ru
' Дата начала: 20.09.2009 г.
' CPU: ATmega16
' Тактовая частота: 16000000 Hz
' Компилятор: BASCOM-AVR 1.11.9.0
' Версия программы для Robbe 1.0
'*******************************************************************************
' Программируемые Fuse:
' SUT0
' BOOTSZ0, BOOTSZ1
' CKORT
' SPIEN
'-------------------------------------------------------------------------------
$regfile = "m16def.dat" 'используем мк ATmega16
$crystal = 16000000 'частота кварцевого резонатора 16mHz
$include "config ports.bas"
$lib "lcd4.lbx" 'используем 4-х битное подключение дисплея с помощью альтернативной библиотеки
Cursor Off
Cls
'---------------------------------Переменные------------------------------------
Dim Minimum As Byte , Maximum As Byte , Center As Byte , Speed As Byte : Speed = 200
Dim X As Integer , I As Integer
Minimum = 80 : Maximum = 160 : Center = Maximum - Minimum 'подсчитываем разворот в градусах для сервопривода
Const Wait1 = 500 : Const Top = 30 : Const Top1 = 75
'-------------------------------------------------------------------------------
1:
Do
Gosub Вперёд
For I = 30 To Top Step 10
X = Center + I
Servo(1) = X
Waitms Wait1
Gosub Sharp_left
Next
For I = 30 To Top Step 10
Servo(1) = Center
Waitms Wait1
Gosub Sharp_center
Next
For I = 30 To Top Step 10
X = Center - I
Servo(1) = X
Waitms Wait1
Gosub Sharp_right
Next
For I = 30 To Top Step 10
Servo(1) = Center
Waitms Wait1
Gosub Sharp_center
Next
Loop
$include "gosub.bas" Метки на которые осущевствляются переходы:
Code
Sharp_right:
Declare Function Sharp_a02(byval 0 As Byte) As Byte
Function Sharp_a02(byval 0 As Byte) As Byte
Local Vout As Word
Start Adc : Vout = Getadc(0) 'Sharp connected for example to PA=0(ADC0)
Stop Adc
If Vout < 700 Then : Sharp_a02 = 0 : Else : Sharp_a02 = 1 : End If
If Sharp_a02 = 1 Then : Gosub Разворот_влево : Waitms 400 : End If
If Sharp_a02 = 1 Then : Gosub 1 : End If
End Function
Return
Sharp_left:
Declare Function Sharp_a0(byval 0 As Byte) As Byte
Function Sharp_a0(byval 0 As Byte) As Byte
Local Vout As Word
Start Adc : Vout = Getadc(0) 'Sharp connected for example to PA=0(ADC0)
Stop Adc
If Vout < 700 Then : Sharp_a0 = 0 : Else : Sharp_a0 = 1 : End If
If Sharp_a0 = 1 Then : Gosub Разворот_вправо : Waitms 400 : End If
If Sharp_a0 = 1 Then : Gosub 1 : End If
End Function
Return
Sharp_center:
Declare Function Sharp(byval 0 As Byte) As Byte
Function Sharp(byval 0 As Byte) As Byte
Local Vout As Word
Start Adc : Vout = Getadc(0) 'Sharp connected for example to PA=0(ADC0)
Stop Adc
If Vout < 700 Then : Sharp = 0 : Else : Sharp = 1 : End If
If Sharp = 1 Then : Gosub Стоп : Waitms 1000 : Gosub Разворот_вправо : Waitms 700 : End If
If Sharp = 1 Then : Gosub 1 : End If
End Function
Return
'' -----------------------------------------------------------------------------
'' Включение комбинации моторов для движения в заданном направлении
'' -----------------------------------------------------------------------------
Стоп: ' стоим на месте
M1f = 0 : M1b = 0 : Pwm1a = 0
M2f = 0 : M2b = 0 : Pwm1b = 0
Return
Вперёд: ' едим вперёд на заданной скорости
M1f = 1 : M1b = 0 : Pwm1a = Speed
M2f = 1 : M2b = 0 : Pwm1b = Speed
Return
Вперёд_вправо: ' поварачиваем вправо на заданной скорости
M1f = 1 : M1b = 0 : Pwm1a = Speed
M2f = 0 : M2b = 0 : Pwm1b = 0
Return
Вперёд_влево: ' поворачиваем влево на заданной скорости
M1f = 0 : M1b = 0 : Pwm1a = 0
M2f = 1 : M2b = 0 : Pwm1b = Speed
Return
Назад: ' едим назад на заданной скорости
M1f = 0 : M1b = 1 : Pwm1a = Speed
M2f = 0 : M2b = 1 : Pwm1b = Speed
Return
Назад_вправо: ' поворачиваем назад-вправо на заданной скорости
M1f = 0 : M1b = 1 : Pwm1a = Speed
M2f = 1 : M2b = 0 : Pwm1b = 0
Return
Назад_влево: ' поворачиваем назад-влево на заданной скорости
M1f = 0 : M1b = 0 : Pwm1a = 0
M2f = 0 : M2b = 1 : Pwm1b = Speed
Return
Разворот_вправо: ' делаем Разворот_вправо на заданной скорости
M1f = 1 : M1b = 0 : Pwm1a = Speed
M2f = 0 : M2b = 1 : Pwm1b = Speed
Return
Разворот_влево: ' делаем Разворот_влево на заданной скорости
M1f = 0 : M1b = 1 : Pwm1a = Speed
M2f = 1 : M2b = 0 : Pwm1b = Speed
Return
И видео:
|
| |
| |
| юрии | Дата: Воскресенье, 20.09.2009, 19:30 | Сообщение # 2 |
Язык программированя: Васик
Зарегистрирован 05.03.2009
Группа: Новички
Сообщений: 572
Город: Югорск
Статус: Offline
| Прикольно) симпатично так)
|
| |
| |
| danger | Дата: Воскресенье, 20.09.2009, 19:47 | Сообщение # 3 |
Язык программированя: пока нет
Зарегистрирован 17.07.2009
Группа: Новички
Сообщений: 168
Город: Чебоксары
Статус: Offline
| респект 
http://vkontakte.ru/club13643816 тыркни по ссылке
|
| |
| |
| Bass85 | Дата: Воскресенье, 20.09.2009, 21:00 | Сообщение # 4 |
Зарегистрирован 12.02.2009
Группа: Опытные
Сообщений: 422
Статус: Offline
| Вот это уже прикольно!!! Красава) А хватает на голову три положение сервы? Я делал больше и мне не очень понравилось. Нужно наверно переписать чтобы плавно поворачивалась так красивее.
ОС это круто а вот как?  Да и для каких целей. Да и для каких целей.
|
| |
| |
| Space | Дата: Воскресенье, 20.09.2009, 21:17 | Сообщение # 5 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Ах да критика и советы приветствуются
Quote (Bass85) Вот это уже прикольно!!! Красава) А хватает на голову три положение сервы? Я делал больше и мне не очень понравилось. Нужно наверно переписать чтобы плавно поворачивалась так красивее.
ОС это круто а вот как? wacko Да и для каких целей.
Спасиб. В принципе да. Я буду еще всё это дело дорабатывать. Там намечается ещё одна серва для изменения положения не только влево и вправо, но вверх и вниз.  Как сделать совсем плавное движение не знаю пока. Могу только сделать постепенное движение по 1 градусу в сторону или более. Как сделать совсем плавное движение не знаю пока. Могу только сделать постепенное движение по 1 градусу в сторону или более.
На счёт ОС. Я же говорю Bascom AVR чудесная вещь, пусть даже говорят, что язык этот медленный. По другому это называется AVR-DOS. Трудность только в её запуске. Для каких целей. Ну сам по суди. Народ парой делает роботов из ноутбуков. И берут за основу ОС для управления датчиками, моторами и т.д. Тоже самое и здесь. Вот и будет мини комп с ОС+флешка в качестве жёсткого диска Ггг... вспомнил я ещё программу хочу для компа написать. Что-то типо терминала управления роботом по каналу блютуз. И камеру(без проводную) подвести, которая изображение на монитор будет передовать. Хе... вот это я замахнулся.  Ещё бы это всё сделать. Попарится хорошо придётся Ещё бы это всё сделать. Попарится хорошо придётся  Добавлено (20.09.2009, 21:17)
---------------------------------------------
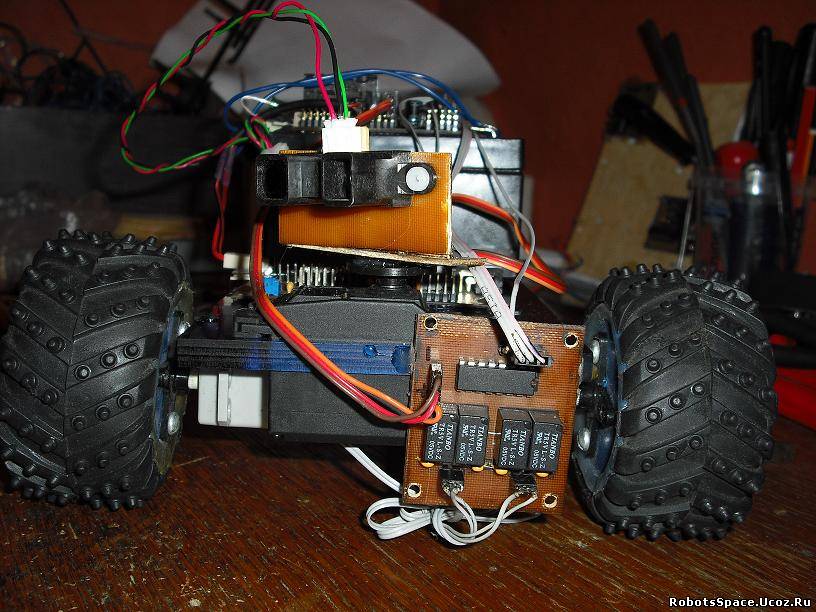
Надо будет ещё свинцовый аккумулятор поменять на пальчековые NiMH аккумуляторы. А то из-за свинцового стабилизатор греется. И ЭТО ЕДИНСТВЕННОЕ, что во всей сборке греется
Как работает драйвер на реле мне нравится 
|
| |
| |
| Bass85 | Дата: Воскресенье, 20.09.2009, 21:51 | Сообщение # 6 |
Зарегистрирован 12.02.2009
Группа: Опытные
Сообщений: 422
Статус: Offline
| Стабилизатор ставь импульсный и все. И по поводу акумов так я бы некогда не поставил свинцовые лучше уже потратится хотя бы на кадмий. Можно с Китая заказать литий.(у нас очень завышены цены на него)
Да и по поводу плавного поворота он как раз так и делается как ты написал) Я еще не пробовал но обязательно буду переписывать под голову.
Сообщение отредактировал Bass85 - Воскресенье, 20.09.2009, 21:54 |
| |
| |
| Space | Дата: Воскресенье, 20.09.2009, 21:54 | Сообщение # 7 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| В плане электронике у меня вообще проблем нет
|
| |
| |
| Space | Дата: Понедельник, 21.09.2009, 00:34 | Сообщение # 8 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
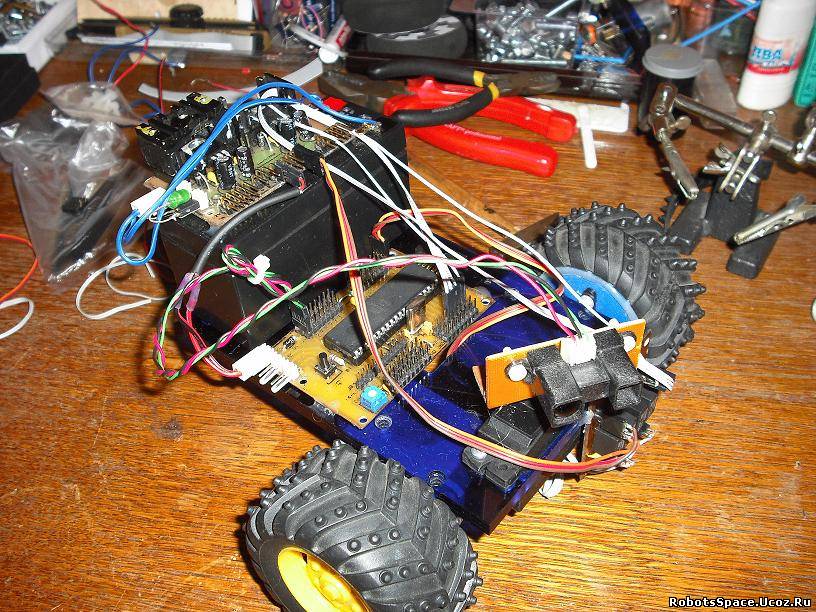
| Не много фото
 
 Добавлено (21.09.2009, 00:34)
---------------------------------------------
Quote (Bass85) Нужно наверно переписать чтобы плавно поворачивалась так красивее.
Почти выяснил как это сделать 
|
| |
| |
| danger | Дата: Понедельник, 21.09.2009, 11:03 | Сообщение # 9 |
Язык программированя: пока нет
Зарегистрирован 17.07.2009
Группа: Новички
Сообщений: 168
Город: Чебоксары
Статус: Offline
| схему пожалуйста
http://vkontakte.ru/club13643816 тыркни по ссылке
|
| |
| |
| Bass85 | Дата: Понедельник, 21.09.2009, 13:23 | Сообщение # 10 |
Зарегистрирован 12.02.2009
Группа: Опытные
Сообщений: 422
Статус: Offline
| Ну вы даете схемы уже давным давно выложены. Сникерсните)
|
| |
| |
| Space | Дата: Понедельник, 21.09.2009, 16:43 | Сообщение # 11 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Чтож. Порыскал хелп в баскоме и он мне помог. Сделать плавное движение сервы 
|
| |
| |
| DeepBlack | Дата: Понедельник, 21.09.2009, 20:50 | Сообщение # 12 |
Язык программированя: C/C++
Зарегистрирован 27.07.2009
Группа: Модераторы
Сообщений: 189
Город: Зеленоград
Статус: Offline
| Молодец!  Здоровский робот. Здоровский робот.
|
| |
| |
| Doniak | Дата: Понедельник, 21.09.2009, 21:44 | Сообщение # 13 |
Язык программированя: CodeVisionAVR Си
Зарегистрирован 19.03.2008
Группа: Модераторы
Сообщений: 584
Город: Кривой Рог (Днепропетровск)
Статус: Offline
| Прикольно головой своей поворачивает 
Ну а ваще молодец 
|
| |
| |
| Space | Дата: Понедельник, 21.09.2009, 22:29 | Сообщение # 14 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Ещё вчера мой кашак пугался этого робота, а что сейчас смотрите сами...
Лазер прицепил для самого себя. Чтобы видеть от какого препятствия он отъезжает.
И серва крутится отлично
|
| |
| |
| danger | Дата: Вторник, 22.09.2009, 07:25 | Сообщение # 15 |
Язык программированя: пока нет
Зарегистрирован 17.07.2009
Группа: Новички
Сообщений: 168
Город: Чебоксары
Статус: Offline
| ха ха прикольно
http://vkontakte.ru/club13643816 тыркни по ссылке
|
| |
| |