|
Монстр :) R1-B1.
|
|
| Doniak | Дата: Среда, 21.05.2008, 10:08 | Сообщение # 16 |
Язык программированя: CodeVisionAVR Си
Зарегистрирован 19.03.2008
Группа: Модераторы
Сообщений: 584
Город: Кривой Рог (Днепропетровск)
Статус: Offline
| ну чо там, получяется?  интересует так как у ниво с поворотами? интересует так как у ниво с поворотами?
|
| |
| |
| Xsenus | Дата: Среда, 21.05.2008, 16:35 | Сообщение # 17 |
Язык программированя: CVAVR язык С
Зарегистрирован 05.05.2008
Группа: Новички
Сообщений: 11
Город: Moscow
Статус: Offline
| Вопро: Где оргстёклышко берёшь????? Тож очень надо
|
| |
| |
| Space | Дата: Воскресенье, 25.05.2008, 19:45 | Сообщение # 18 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Quote (Doniak) ну чо там, получяется? yes3 интересует так как у ниво с поворотами?
У меня сейчас экзаменны так что не когда. Но видео будет это я тебе обещаю.
Quote (Xsenus) Вопро: Где оргстёклышко берёшь????? Тож очень надо
В любом магазине где продают и вырезают на заказ стекло.
|
| |
| |
| Space | Дата: Четверг, 29.05.2008, 23:52 | Сообщение # 19 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Ну вот собственно эти повороты. Если честно, то делает он их с трудом. Короче так и шестирёнки полететь могут. Буду делать расстояние между сервами меньше как на фотках.


|
| |
| |
| Doniak | Дата: Пятница, 30.05.2008, 21:56 | Сообщение # 20 |
Язык программированя: CodeVisionAVR Си
Зарегистрирован 19.03.2008
Группа: Модераторы
Сообщений: 584
Город: Кривой Рог (Днепропетровск)
Статус: Offline
| я думал онавообще небудит поворачивать:)
ужасный скрежит, наверно сервы так долго непротянут
боюсь сближение серв сильно непоможет  зато если гусеницы натянуть думаю будит он шустрее. зато если гусеницы натянуть думаю будит он шустрее.
|
| |
| |
| Space | Дата: Пятница, 30.05.2008, 22:32 | Сообщение # 21 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Вот именно. Долго не протянут. А сближение как раз помогло. Потом покажу. А танк у меня есть, но он зараза маленький довольно таки и шума слишком много
 

|
| |
| |
| Space | Дата: Воскресенье, 01.06.2008, 22:35 | Сообщение # 22 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
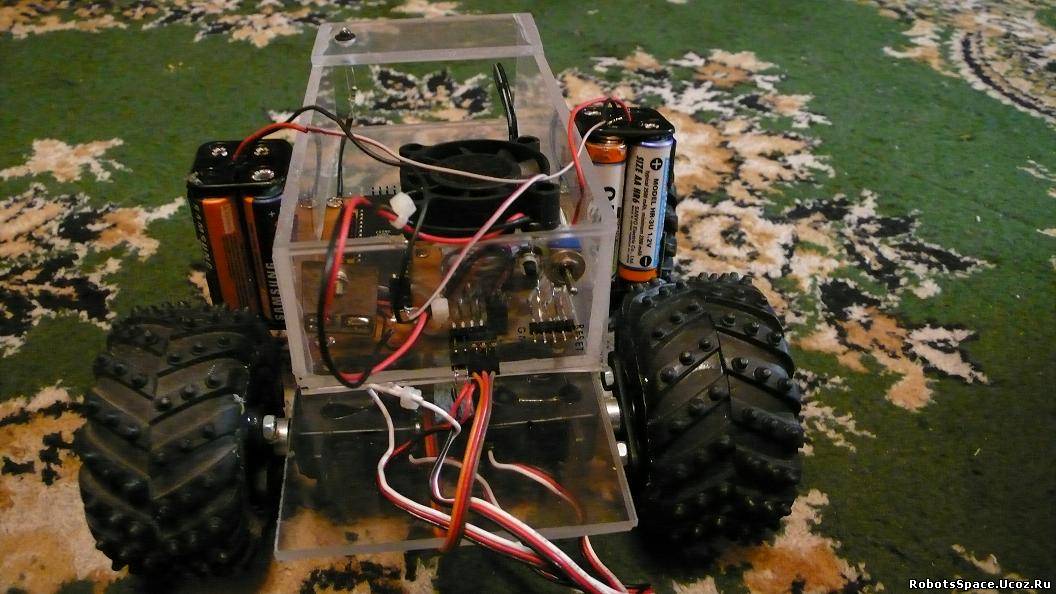
| Ну наконец-то у меня готова нормальная ходовая часть для робота. Всё нормально разворачивается. Программа работает как надо(движение по таблице вероятностей). Вообщем пока проблем нет.
 
|
| |
| |
| Doniak | Дата: Понедельник, 02.06.2008, 00:22 | Сообщение # 23 |
Язык программированя: CodeVisionAVR Си
Зарегистрирован 19.03.2008
Группа: Модераторы
Сообщений: 584
Город: Кривой Рог (Днепропетровск)
Статус: Offline
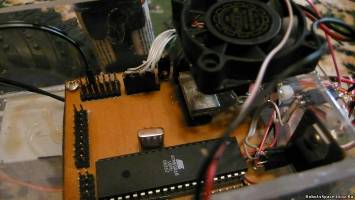
| необичний трёхкалёсний даже с кулером  неужели 7805 так сильно греитса неужели 7805 так сильно греитса
|
| |
| |
| Space | Дата: Понедельник, 02.06.2008, 11:31 | Сообщение # 24 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Ну 3-ый потому что на одной серве сломана шестерёнка. А кулер для микросхемы, но я уже снял его. Решил поставить радиатор. А стабилизатор на моё удивление тёплый ели-ели.
|
| |
| |
| Space | Дата: Вторник, 03.06.2008, 19:58 | Сообщение # 25 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
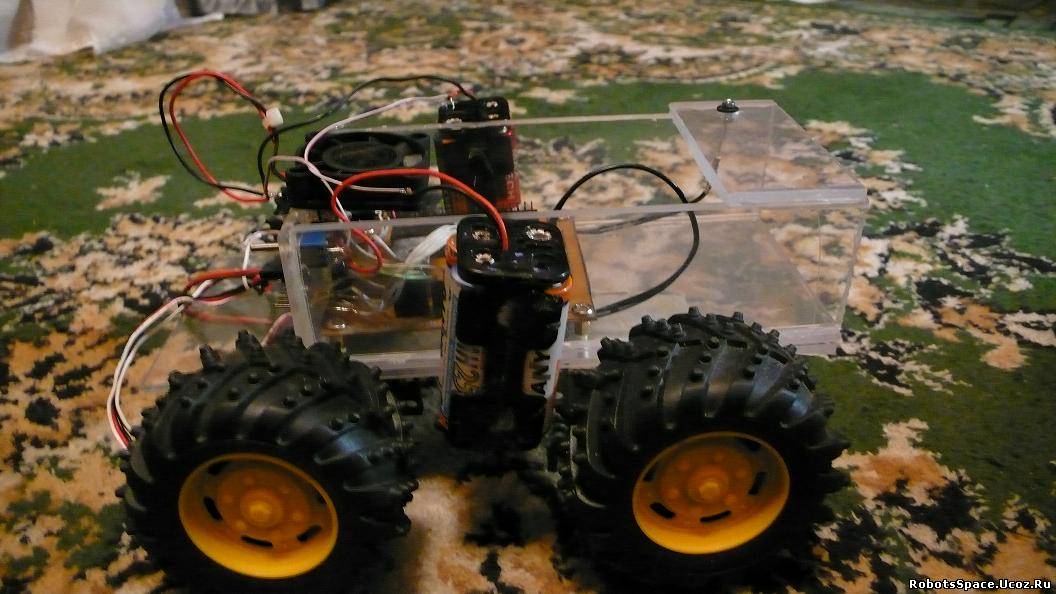
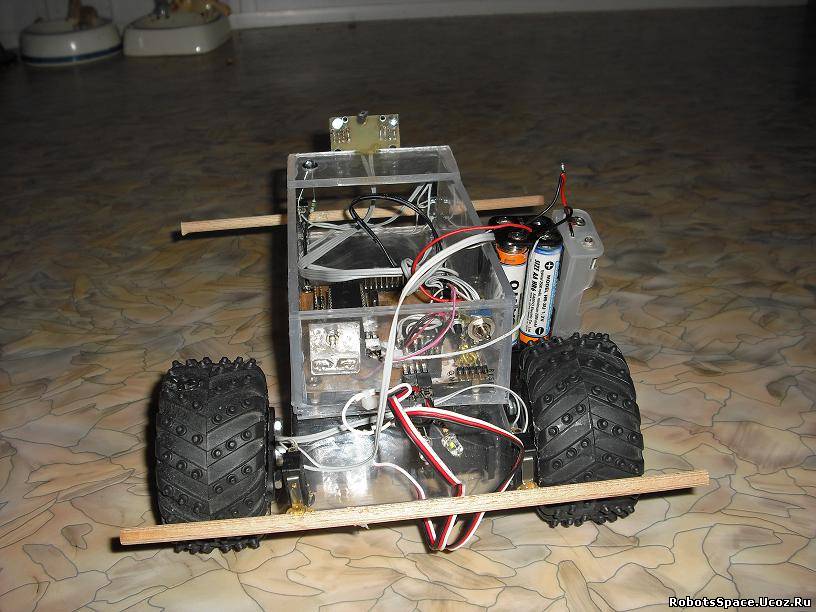
| Пока нет 4 сервы решил снять одну. Оставил 2 сервы и поставил калёсико свободно вращающееся. Поставил передний и задний бампер. Видео выложу потом. А пока сама прога и пара фоток.
  Добавлено (03.06.2008, 19:58)
---------------------------------------------
|
| |
| |
| Space | Дата: Воскресенье, 08.06.2008, 21:40 | Сообщение # 26 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Написал программу для следования по линии. За датчики взял модуль датчика линии на основе компаратора LM311 FireFly
Вот
Code // Программа следования по линии для Проекта мобильного робота "R1-B1"
// Автор Space:
// -мк ATmega16
// -используется кварц на 8мГц
// -компилятор WinAVR V2.0.5
// Программа 2008 для робота R1-B1 - www.robptsspace.ucoz.ru
//------------------------------------------------------------------------
#include <avr/io.h>
#define bit_is_clear(sfr, bit) \
(!(sfr & _BV(bit)))
#define bit_is_set(sfr, bit) (sfr & _BV(bit))
// назначение определений для танкового привода
#define OUT PORTA
#define MOTOR_FR PA0 // вперед-вправо
#define MOTOR_BR PA1 // назад-вправо
#define MOTOR_BL PA2 // назад-влево
#define MOTOR_FL PA3 // вперед-влево
#define IN PIND
#define LIGHT_R PD0 // правый фотодиод
#define LIGHT_L PD1 // левый фотодиод
#define LED PD4 // светодиод
// Возможные режимы движения для танкового привода
enum {STOP, F, FR, FL};
//------------------------------------------------------------------------------
// Задержка t х 10ms
//------------------------------------------------------------------------------
//#define F_CPU 8000000
#define K_DELAY_10ms F_CPU/600
void Delay_10ms(unsigned char t) {
if (t==0) return;
unsigned int i;
while (t--) for(i=0;i<K_DELAY_10ms; i++);
}
//------------------------------------------------------------------------------
// Включение комбинации моторов для движения в заданном направлении
//------------------------------------------------------------------------------
void go(unsigned char direction){
switch (direction) {
case STOP:
cbi(OUT, MOTOR_FR);
cbi(OUT, MOTOR_BR);
cbi(OUT, MOTOR_BL);
cbi(OUT, MOTOR_FL);
break;
case F:
sbi(OUT, MOTOR_FR);
cbi(OUT, MOTOR_BR);
cbi(OUT, MOTOR_BL);
sbi(OUT, MOTOR_FL);
break;
case FR:
cbi(OUT, MOTOR_FR);
cbi(OUT, MOTOR_BR);
cbi(OUT, MOTOR_BL);
sbi(OUT, MOTOR_FL);
break;
case FL:
sbi(OUT, MOTOR_FR);
cbi(OUT, MOTOR_BR);
cbi(OUT, MOTOR_BL);
cbi(OUT, MOTOR_FL);
break;
}
}
//------------------------------------------------------------------------------
// "STOP", ЕСЛИ НЕТ СИГНАЛА
//------------------------------------------------------------------------------
unsigned char walk(void){
// этот цикл организует STOP пока
// нет сигнала ни от одного из датчиков освещенности
while((bit_is_clear(IN, LIGHT_R)) && (bit_is_clear(IN, LIGHT_L))){
go(STOP);
cbi(PORTD, LED); // зажигаем светодиод на PD4
Delay_10ms(125); // движемся в этом направлении 2.5 сек
sbi(PORTD, LED); // гасим светодиод на PD4
Delay_10ms(125); // движемся в этом направлении 2.5 сек
}
// этот цикл организует движение на свет, пока
// есть сигнал хотя бы от одного из датчиков освещенности
while((bit_is_set(IN, LIGHT_R)) || (bit_is_set(IN, LIGHT_L))){
if((bit_is_set(IN, LIGHT_R)) && (bit_is_set(IN, LIGHT_L))) go(F);
else if(bit_is_set(IN, LIGHT_R)) go(FR);
else if(bit_is_set(IN, LIGHT_L)) go(FL);
}
return(0);
}
//------------------------------------------------------------------------------
// Главная программа
//------------------------------------------------------------------------------
int main(void)
{
DDRA = 0xff; // назначаем все линии порта A на выход
PORTA = 0x00; // и устанавливаем на них низкий уровень
DDRD = 0x10; // назначаем все линии порта D на вход, кроме PD4
PORTD = 0xef; // подключаем внутренние нагрузочные резисторы, кроме PD4
// для подсчета числа миганий в цикле
unsigned char i;
for (i=0;i<5;i++){ // Подмигиваем пять раз
cbi(PORTD, LED); // Зажигаем LED
Delay_10ms(250); // пауза
sbi(PORTD, LED); // гасим LED
Delay_10ms(250); // пауза
}
// запускаем главный цикл
while(1) walk();
}
Добавлено (08.06.2008, 21:40)
---------------------------------------------
Хочу поставить ещё третий датчик по центру. Чтоб робот видел линию, а не только следовал по краям линии
|
| |
| |
| DZHohn | Дата: Пятница, 13.06.2008, 20:39 | Сообщение # 27 |
Зарегистрирован 12.06.2008
Группа: Новички
Сообщений: 88
Город: Серноводск
Статус: Offline
| Quote (Space) Через недели 2 пойду и куплю ещё 2 сервы и переделаю их зачем сервы????  просто моторчики нельзя чтоли? просто моторчики нельзя чтоли? 
Я верю в пацифизм, добро должно победить
Но как мне жить!? Как мне сейчас жить!?
Так надоело ждать, так надоел страх
Спасайся сам, а это значит
Возьми кирпич и дай им сдачи!
Бери кирпич и дай им! деньги нужны всем
|
| |
| |
| Space | Дата: Понедельник, 16.06.2008, 13:52 | Сообщение # 28 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
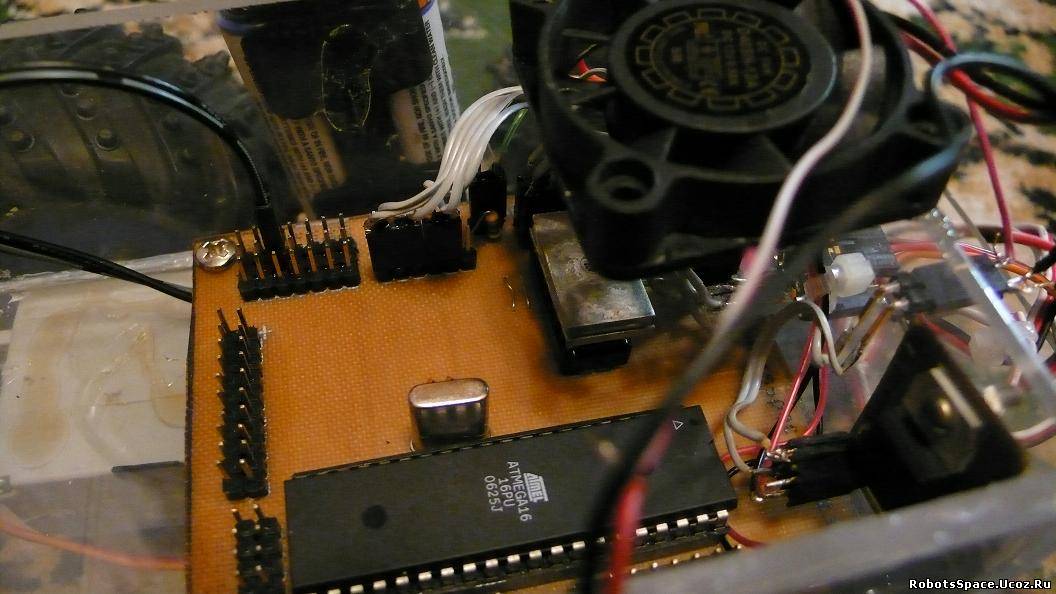
| Потому что с моторчиками просто не потянет всё. Слишком вес для них большой. Нужны либо сервы, либо готовая платформа типо радиуправляемых игрушек, либо самодельные редукторы. Добавлено (15.06.2008, 10:13)
---------------------------------------------
Написал прогу под три датчика. Пока опробовал с помощью кнопок. Плату использовал новую
Добавлено (16.06.2008, 13:52)
---------------------------------------------
- вот это ане напомнило старые машинки у которых пульт управление на проводе был.  Настольгия Настольгия
едим по прямой. программа написанна для трёх датчиков
- едим по часовой и против
Сама программа под эту плату:
Code // Программа следования по линии для Проекта мобильного робота "R1-B1"
// Автор Space:
// -мк ATmega16
// -используется кварц на 8мГц
// -компилятор WinAVR V2.0.5
// Программа 2008 для робота R1-B1 - www.robptsspace.ucoz.ru
//------------------------------------------------------------------------
#include <avr/io.h>
#define bit_is_clear(sfr, bit) \
(!(sfr & _BV(bit)))
#define bit_is_set(sfr, bit) (sfr & _BV(bit))
// назначение определений для танкового привода
#define OUT PORTA
#define MOTOR_FR PA0 // вперед-вправо
#define MOTOR_BR PA1 // назад-вправо
#define MOTOR_BL PA2 // назад-влево
#define MOTOR_FL PA3 // вперед-влево
#define IN PIND
#define LIGHT_R PD4 // правый фотодиод
#define LIGHT_Center PD5 // центральный фотодиод
#define LIGHT_L PD6 // левый фотодиод
#define LED PD2 // светодиод
// Возможные режимы движения для танкового привода
enum {STOP, F, FR, FL};
//------------------------------------------------------------------------------
// Задержка t х 10ms
//------------------------------------------------------------------------------
//#define F_CPU 8000000
#define K_DELAY_10ms F_CPU/600
void Delay_10ms(unsigned char t) {
if (t==0) return;
unsigned int i;
while (t--) for(i=0;i<K_DELAY_10ms; i++);
}
//------------------------------------------------------------------------------
// Включение комбинации моторов для движения в заданном направлении
//------------------------------------------------------------------------------
void go(unsigned char direction){
switch (direction) {
case STOP:
cbi(OUT, MOTOR_FR);
cbi(OUT, MOTOR_BR);
cbi(OUT, MOTOR_BL);
cbi(OUT, MOTOR_FL);
break;
case F:
sbi(OUT, MOTOR_FR);
cbi(OUT, MOTOR_BR);
cbi(OUT, MOTOR_BL);
sbi(OUT, MOTOR_FL);
break;
case FR:
cbi(OUT, MOTOR_FR);
cbi(OUT, MOTOR_BR);
cbi(OUT, MOTOR_BL);
sbi(OUT, MOTOR_FL);
break;
case FL:
sbi(OUT, MOTOR_FR);
cbi(OUT, MOTOR_BR);
cbi(OUT, MOTOR_BL);
cbi(OUT, MOTOR_FL);
break;
}
}
//------------------------------------------------------------------------------
// "STOP", ЕСЛИ НЕТ СИГНАЛА
//------------------------------------------------------------------------------
unsigned char walk(void){
// этот цикл организует остановку
while((bit_is_clear(IN, LIGHT_R)) && (bit_is_clear(IN, LIGHT_Center)) && (bit_is_clear(IN, LIGHT_L))){
go(STOP);
cbi(PORTD, LED); // зажигаем светодиод на PD4
Delay_10ms(125); // движемся в этом направлении 2.5 сек
sbi(PORTD, LED); // гасим светодиод на PD4
Delay_10ms(125); // движемся в этом направлении 2.5 сек
}
// этот цикл организует движение на свет, пока
// есть сигнал хотя бы от одного из датчиков освещенности
while((bit_is_set(IN, LIGHT_L)) || (bit_is_clear(IN, LIGHT_Center)) || (bit_is_set(IN, LIGHT_R))){
if((bit_is_set(IN, LIGHT_L)) && (bit_is_set(IN, LIGHT_Center)) && (bit_is_set(IN, LIGHT_R))) go(STOP); // останавливается
else if((bit_is_clear(IN, LIGHT_R)) && (bit_is_clear(IN, LIGHT_Center)) && (bit_is_clear(IN, LIGHT_L))) go(F);
else if((bit_is_set(IN, LIGHT_L)) && (bit_is_clear(IN, LIGHT_Center)) && (bit_is_set(IN, LIGHT_R))) go(F); // вперёд по чёрной линии
else if((bit_is_set(IN, LIGHT_L)) && (bit_is_set(IN, LIGHT_Center)) && (bit_is_clear(IN, LIGHT_R))) go(FR); // направо по чёрной линии
else if((bit_is_clear(IN, LIGHT_L)) && (bit_is_set(IN, LIGHT_Center)) && (bit_is_set(IN, LIGHT_R))) go(FL); // налево по чёрной линии
else if((bit_is_set(IN, LIGHT_L))) go(FR); // направо по чёрной линии
else if((bit_is_set(IN, LIGHT_R))) go(FL); // налево по чёрной линии
}
return(0);
}
//------------------------------------------------------------------------------
// Главная программа
//------------------------------------------------------------------------------
int main(void)
{
DDRA = 0xff; // назначаем все линии порта A на выход
PORTA = 0x00; // и устанавливаем на них низкий уровень
DDRD = 0x04; // назначаем все линии порта D на вход, кроме PD2
PORTD = 0xfb; // подключаем внутренние нагрузочные резисторы, кроме PD2
// Задержка на старте 5 сек
// чтобы успеть отбежать в сторону :)
// для подсчета числа миганий в цикле
unsigned char i;
for (i=0;i<5;i++){ // Подмигиваем пять раз
cbi(PORTD, LED); // Зажигаем LED
Delay_10ms(250); // пауза
sbi(PORTD, LED); // гасим LED
Delay_10ms(250); // пауза
}
// запускаем главный цикл
while(1) walk();
}
|
| |
| |
| Les | Дата: Четверг, 19.06.2008, 15:38 | Сообщение # 29 |
|
| Quote (Space) вот это ане напомнило старые машинки у которых пульт управление на проводе был. smile3 Настольгия senile
А что прикольно. Вот вам и игрушка детская. Только надо платформу меньше и провод длиньше
|
| |
| |
| DZHohn | Дата: Воскресенье, 22.06.2008, 19:28 | Сообщение # 30 |
Зарегистрирован 12.06.2008
Группа: Новички
Сообщений: 88
Город: Серноводск
Статус: Offline
| Quote (Space) Потому что с моторчиками просто не потянет всё. Слишком вес для них большой. Нужны либо сервы, либо готовая платформа типо радиуправляемых игрушек, либо самодельные редукторы.
понял пробую сделать редуктор, ничего не получается 
Я верю в пацифизм, добро должно победить
Но как мне жить!? Как мне сейчас жить!?
Так надоело ждать, так надоел страх
Спасайся сам, а это значит
Возьми кирпич и дай им сдачи!
Бери кирпич и дай им! деньги нужны всем
|
| |
| |
|