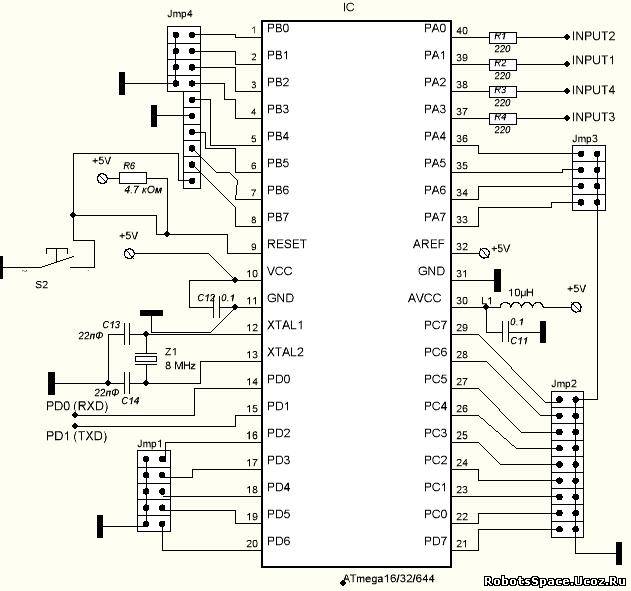
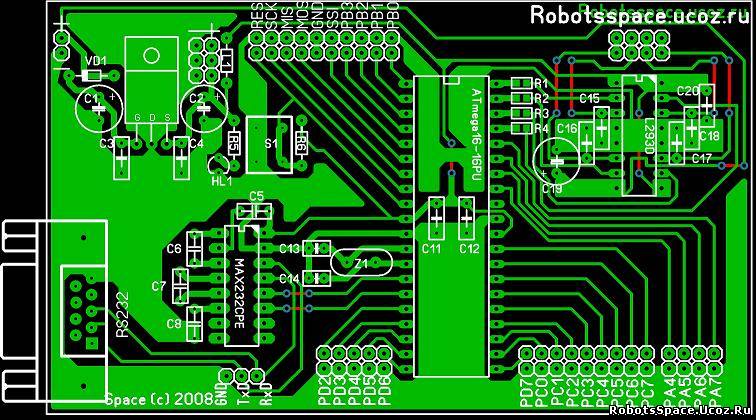
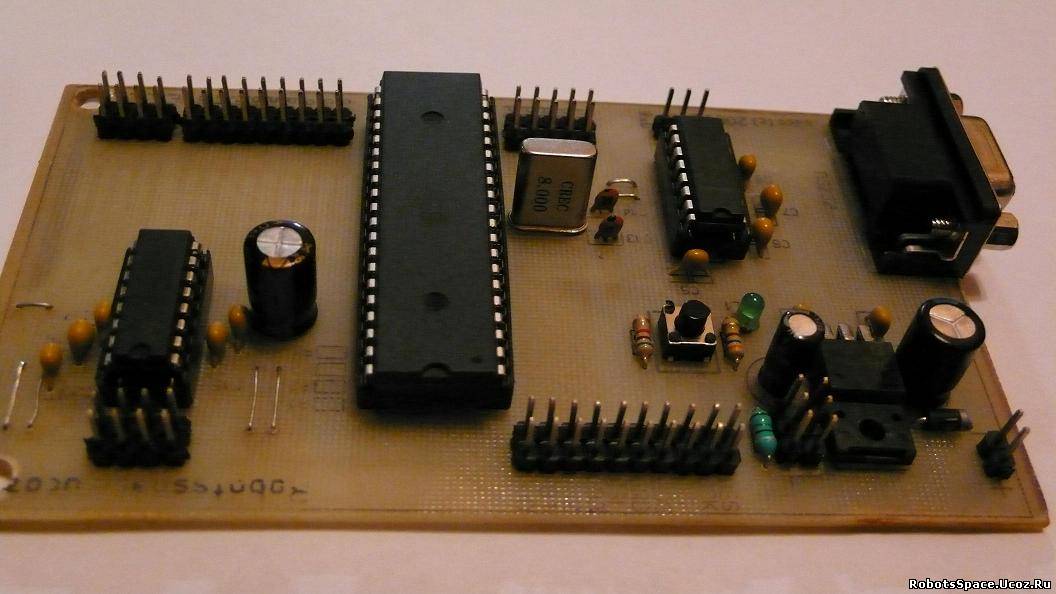
Ну чтож. Теперь готов настоящий уневирсальный робо-контроллер. Который прошёл тест. И показал свою стабильную работу. Вообщем проблем не возникало. Если у меня в процессе работы будут какие то неисправности, то буду описывать в соответствующий теме. Робо-контроллер был подготовлен с помощью FireFly и с использованием его материала с сайта http://robozone.su/ Единственный минус этой платы - это большие размеры, но поверьте оно того стоит. Теперь о самой схеме. В качестве основного микроконтроллера выступает ATmega16-16PU. Также спокойно можно использовать мк ATmega32/644. Все эти микроконтроллеры полностью совместимы по выводам и командам.
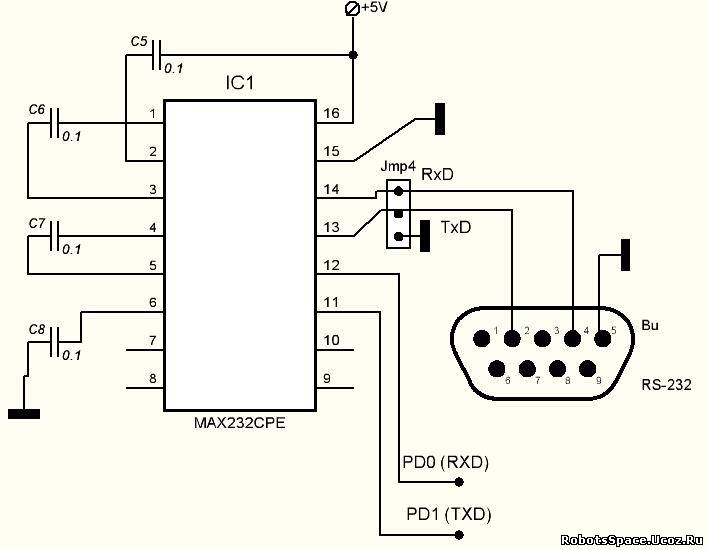
Тактирование МК осуществляется от внешнего кварцевого резонатора на 8Mhz, но можно поставить и 4Mhz, и 8Mhz. Связь с персональным компьютером реализована посредством СОМ-порта, а
конкретно с помощью микросхемы - преобразователя уровня TTL MAX232CPE,
так же в исполнении DIP (внимание: напрямую линии TX и RX
микроконтроллера соединять с СОМ-портом компьютера нельзя!). На плате дополнительно выведен разъем для самодельного коммуникационного кабеля
(раздел "Начинающим"). При отсутствии в компьютере СОМ-порта есть
возможность использования конверторов USB->COM (выведен
соответствующий разъем). Так же на данные дополнительные разъемы можно
подключить различные модули беспроводного канала связи с ПК.
Контроллер
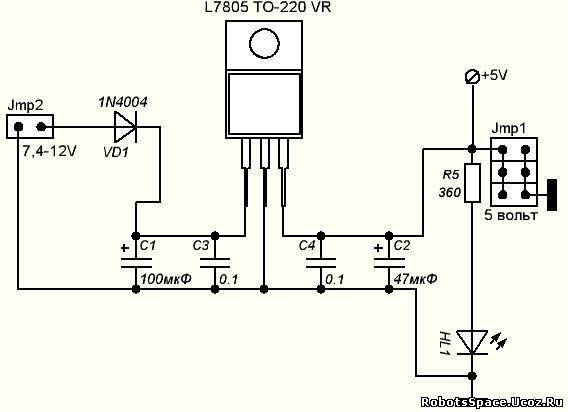
имеет собственный стабилизированный источник питания на 5 вольт и с
максимальным током на выходе до 1,5 ампер. Таким образом, можно питать
достаточно много внешних модулей и устройств от самого контроллера. В основе источника питания лежит популярный и недорогой линейный стабилизатор L7805 (иностранный аналог отечественной КРЕН5). Рекомендуемый диапазон подаваемых внешних
напряжений на стабилизатор – от 7,4 до 12 вольт. Меньше нельзя, так как
на нем присутствует падение от 1,5 до 2,5 вольт (зависит от
производителя и конкретной модели) и стабилизатор перестает стабильно
работать.
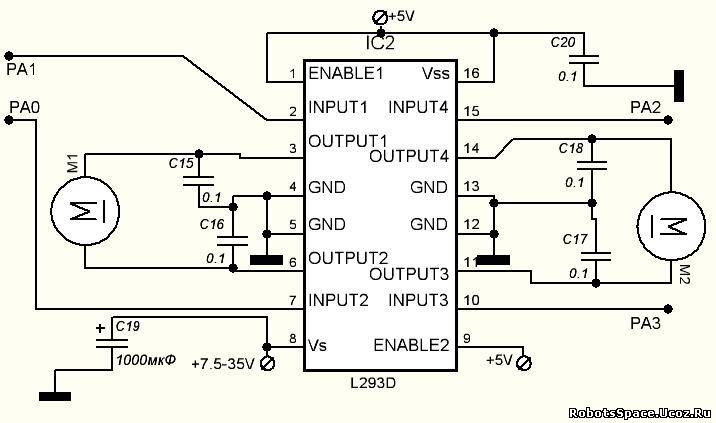
Также на плате уже есть микросхема L293D для управления двигателями. Питание самой микросхемы 5 вольт. Питание двигателей Vs подключенно отдельно после диода 1N4004.
Печатная плата выполнена односторонним монтажом с использованием
нескольких перемычек для «лазерно-утюжного» метода (ЛУТ – об этом
отдельная тема).
Вск детали маркированны на плате. Вам только нужно навести курсор на деталь. Ну всё всем удачи!
Скачать схему в формате sPlan и печатную плату в формате Sprint-Layout 5.0 можно тут.
Категория: Контроллеры | Добавил: Space (14.06.2008)
| Автор: Кирилл
Просмотров: 9697
| Теги:
| Рейтинг: 4.8/5 |
Всего комментариев: 0
Добавлять комментарии могут только зарегистрированные пользователи. [ Регистрация | Вход ]


 roboforum
roboforum