|
Монстр :) R1-B1.
|
|
| Space | Дата: Вторник, 15.04.2008, 22:36 | Сообщение # 1 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Ну вот  Дошли руки до более сложной программы с которой я разобрался и переделал под те требования, которые нужны мне. Пока правдо на видео можно увидеть как робот по таблице вероятностей двигается Дошли руки до более сложной программы с которой я разобрался и переделал под те требования, которые нужны мне. Пока правдо на видео можно увидеть как робот по таблице вероятностей двигается  по комнате объезжая препятствия, но пока только с контактными датчиками по комнате объезжая препятствия, но пока только с контактными датчиками  . Дальше хочу добавить фотодиоды для движения на свет и ик - бампера, но это в разработке. Потом буду думать дальше, что интересного можно с ним сделать. Пока на метел только подключение флешки. Если есть у кого какие идеи предлагайте выслушаю . Дальше хочу добавить фотодиоды для движения на свет и ик - бампера, но это в разработке. Потом буду думать дальше, что интересного можно с ним сделать. Пока на метел только подключение флешки. Если есть у кого какие идеи предлагайте выслушаю


|
| |
| |
| Les | Дата: Среда, 16.04.2008, 11:23 | Сообщение # 2 |
|
|  Ну разве, что LCD попробовать добавить Ну разве, что LCD попробовать добавить  Только, что на нём выводить можно я предложить не могу. Хотя например сколько раз он сталкивался. Но это наверно глупо. Решать тебе Только, что на нём выводить можно я предложить не могу. Хотя например сколько раз он сталкивался. Но это наверно глупо. Решать тебе
|
| |
| |
| Space | Дата: Суббота, 19.04.2008, 23:45 | Сообщение # 3 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
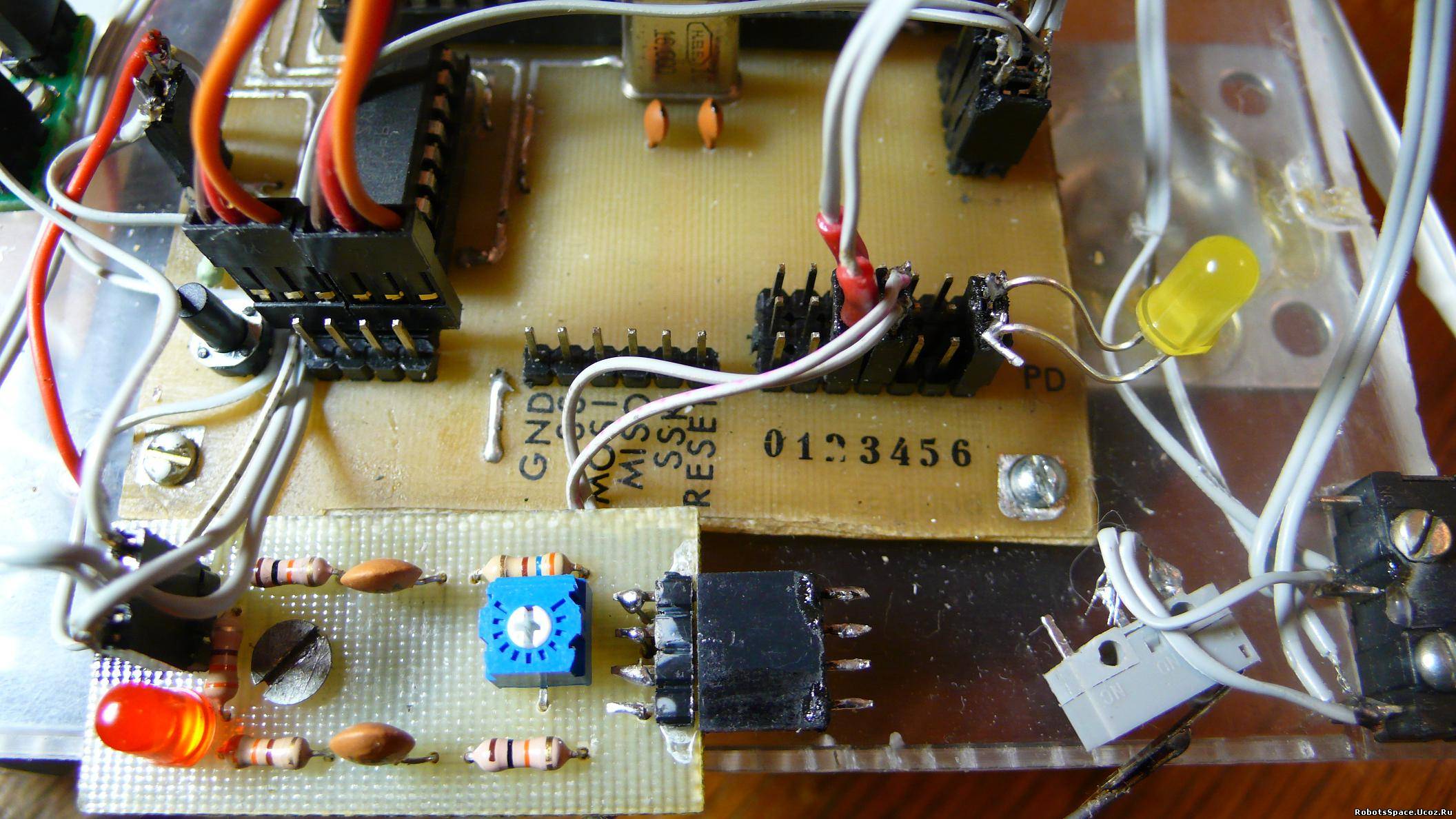
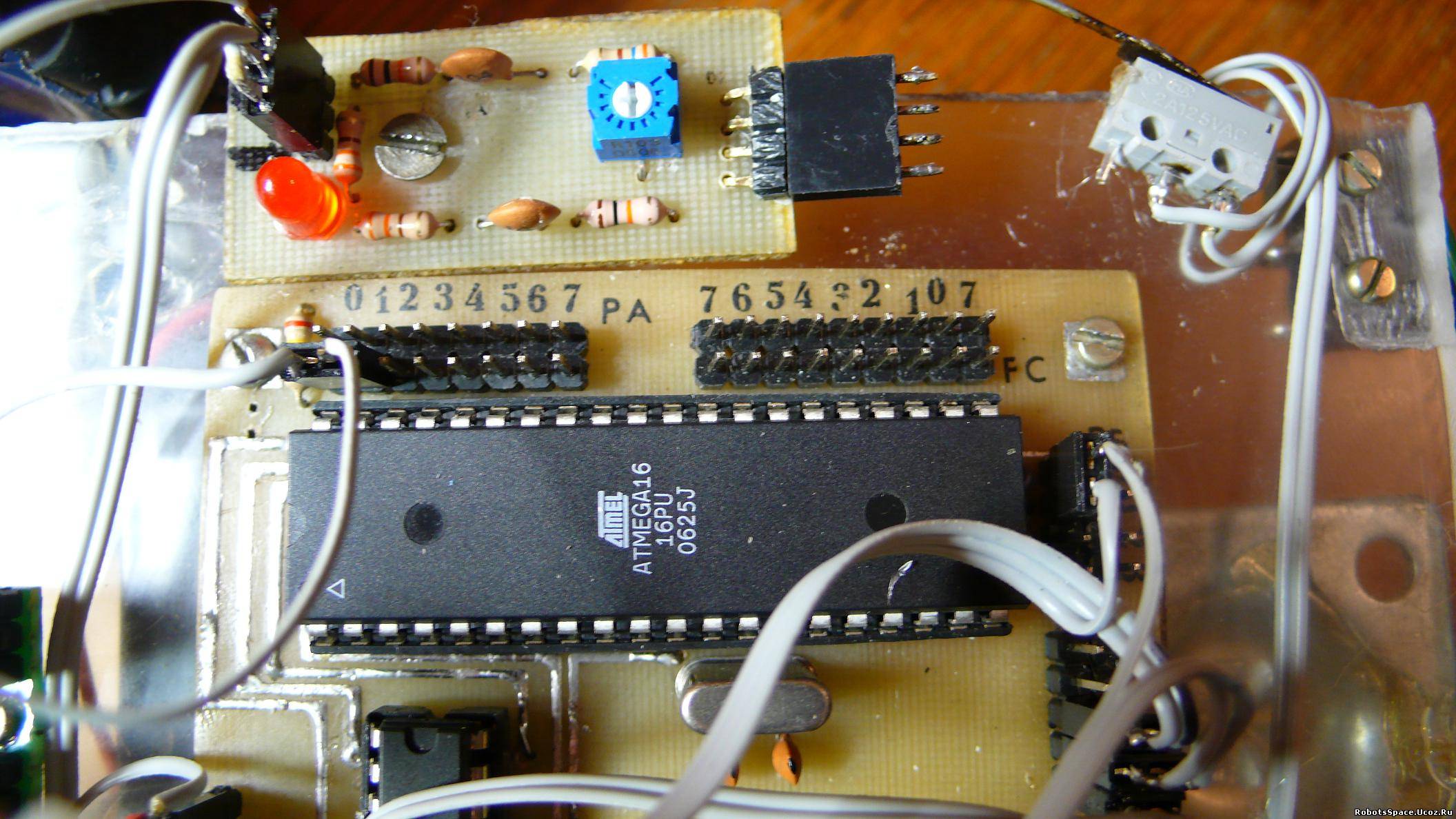
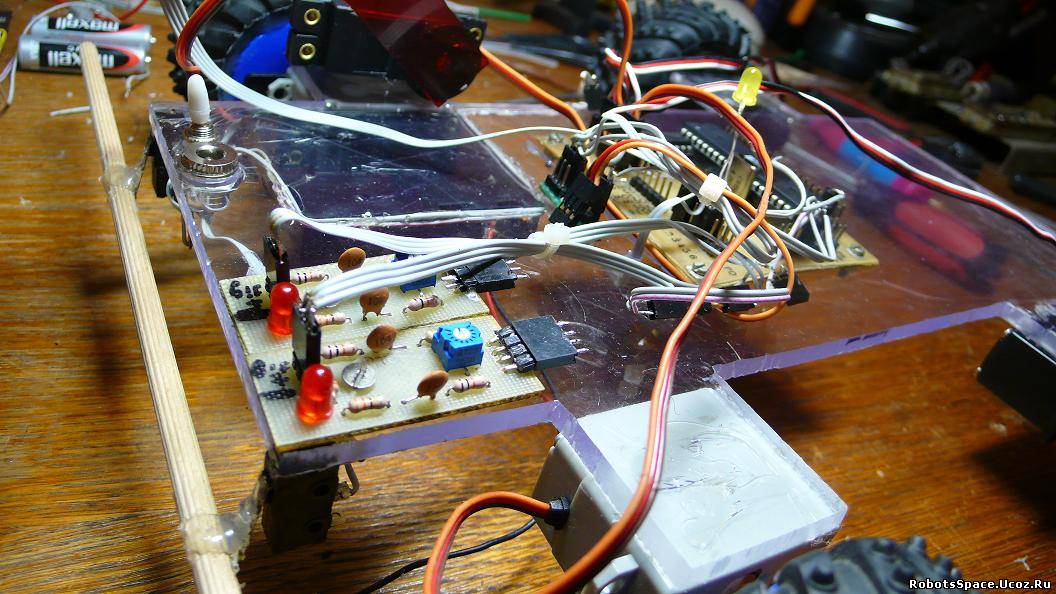
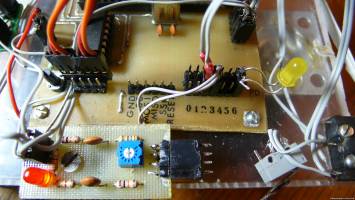
| Фотки в хорошем качестве. С рабочими датчиками, которые предоставил для общего пользования FireFly. За что ему спасибо. Так же у него на сайте появилась схема ик - бампера .
Сейчас думаю как заставить работать сервы. Если есть идеи, то сюда. Там думаем над программой для компилятора WinAVR. Есть рабочая прога для компилятора CodeVision. Выложенна там же.

|
| |
| |
| Space | Дата: Понедельник, 21.04.2008, 22:01 | Сообщение # 4 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
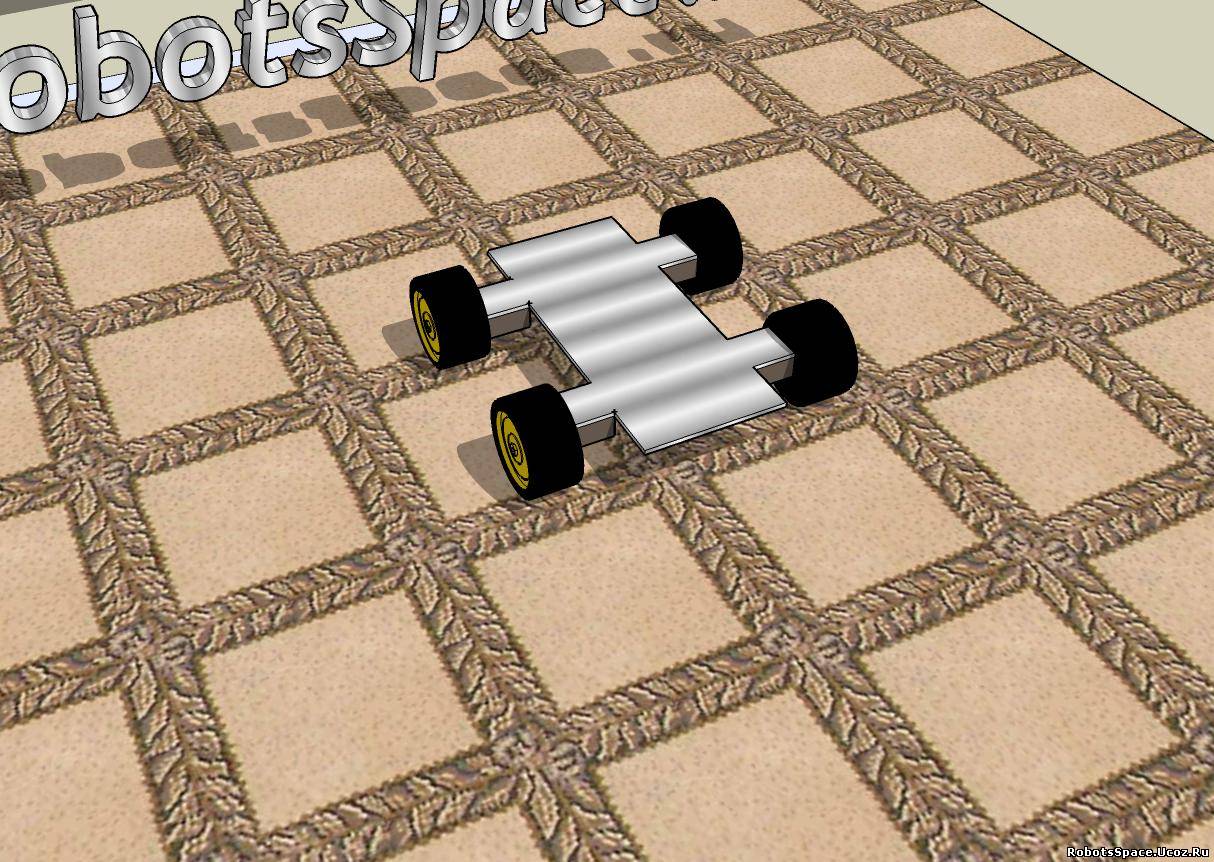
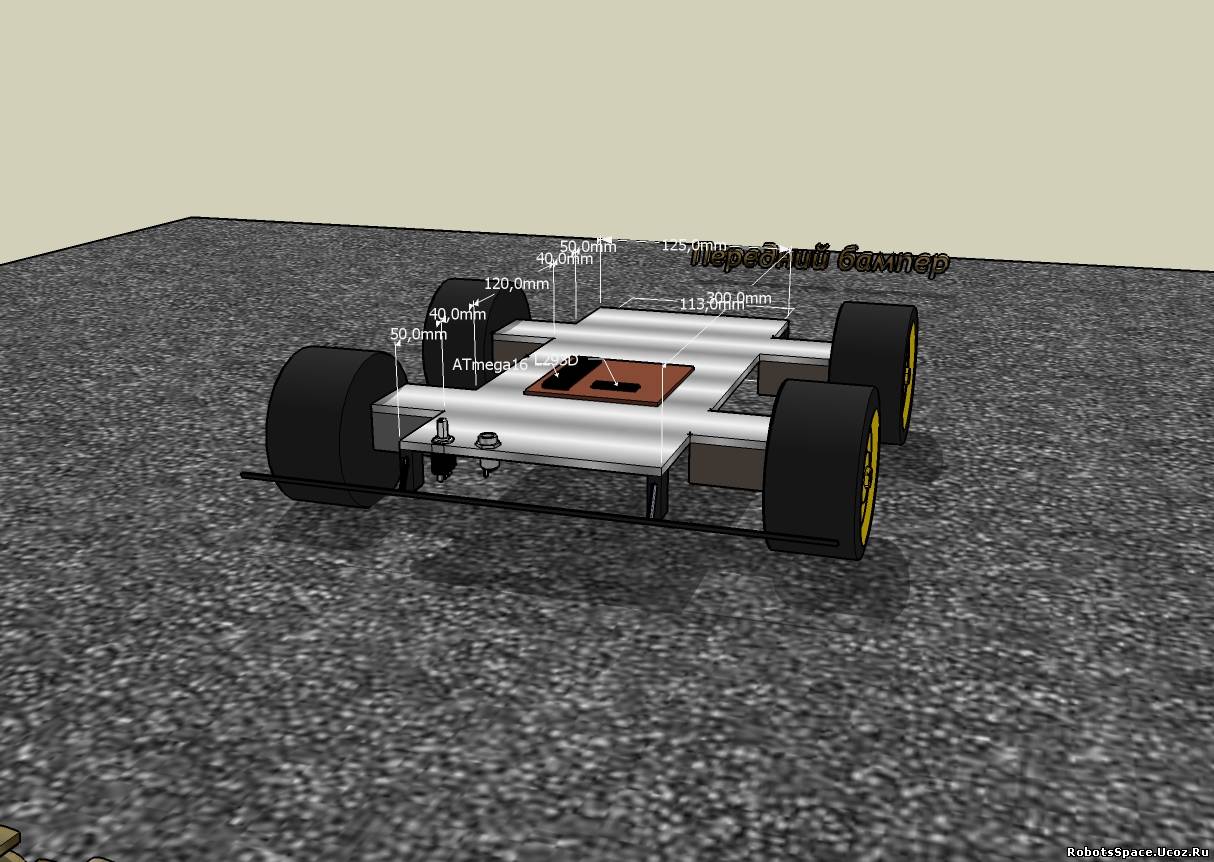
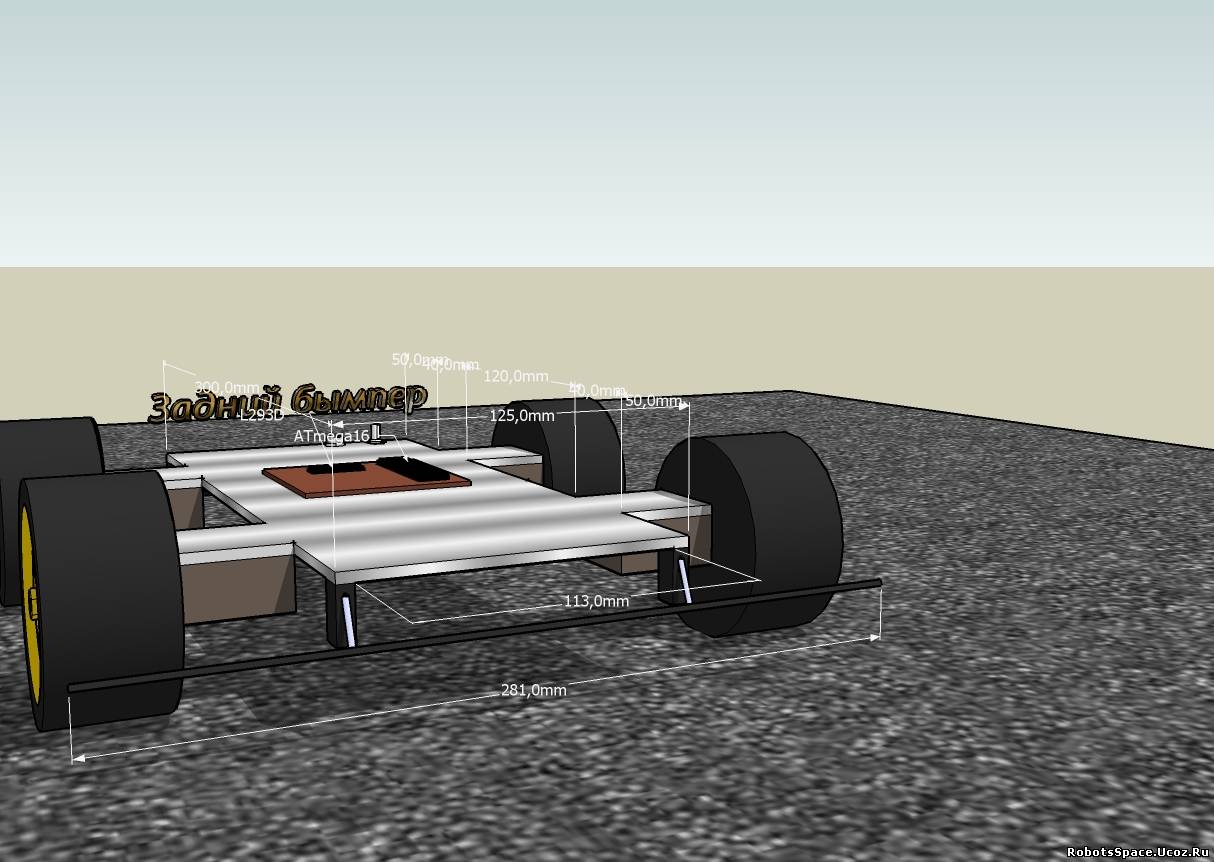
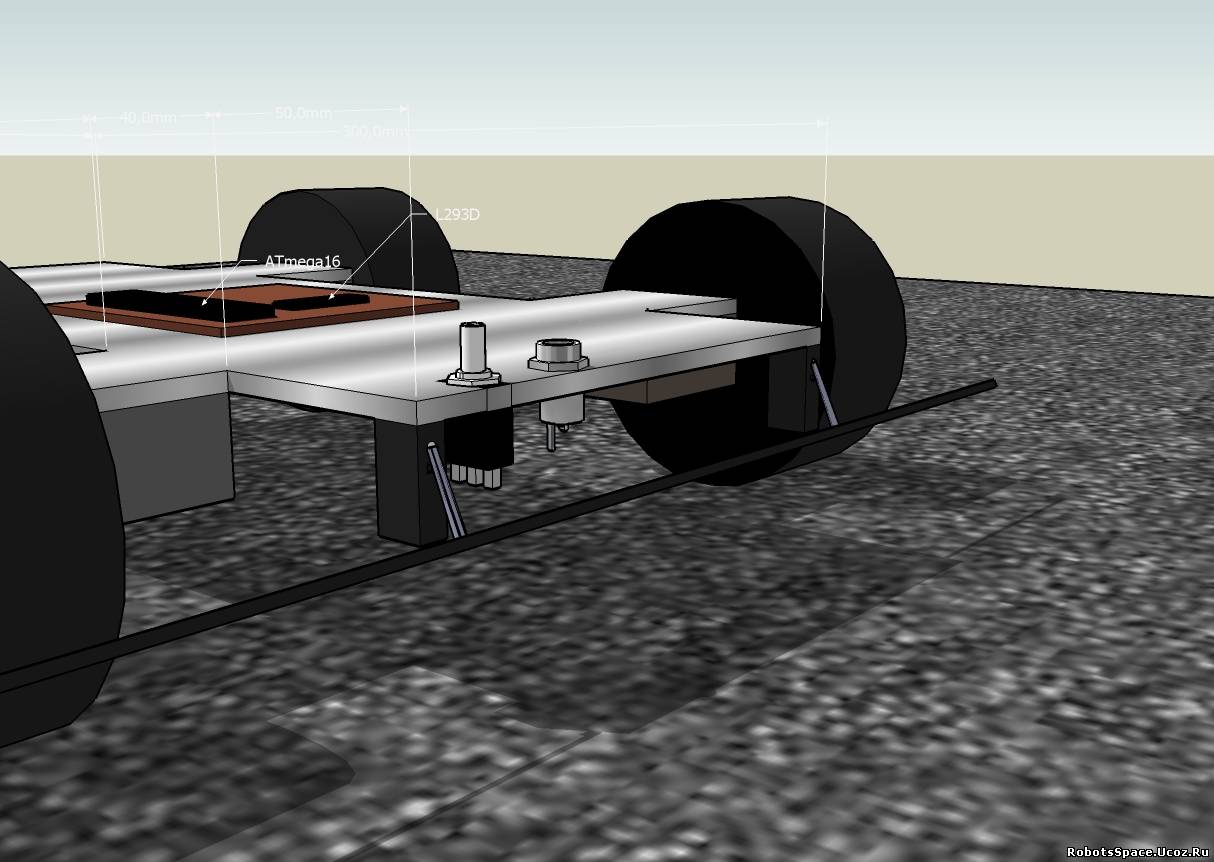
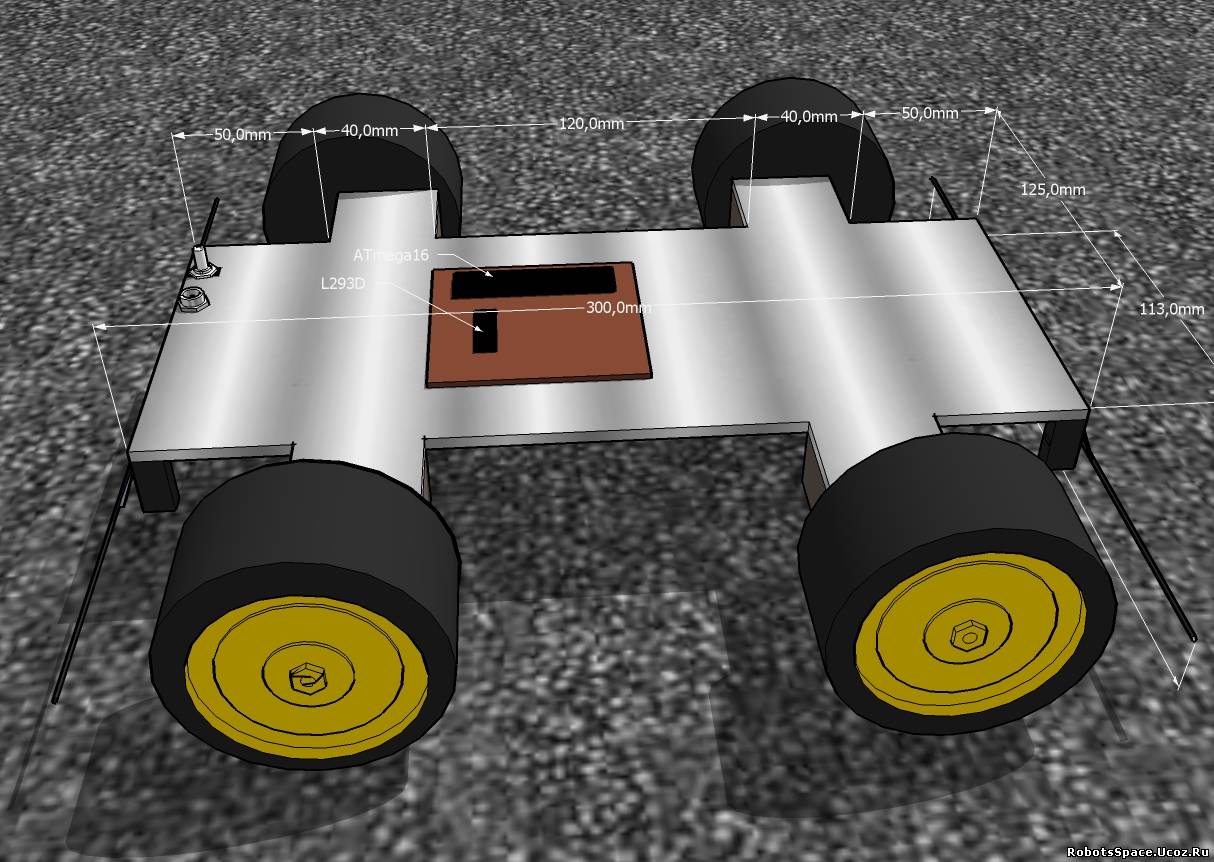
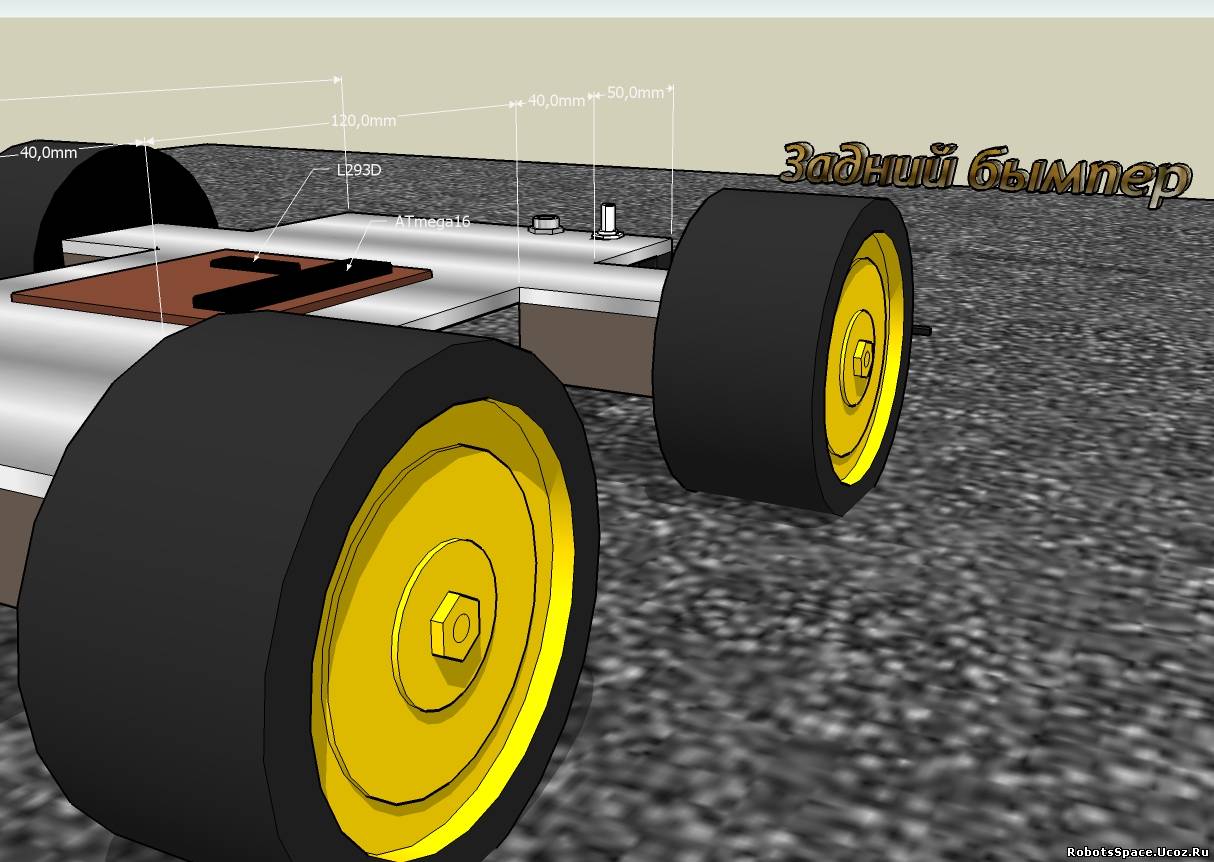
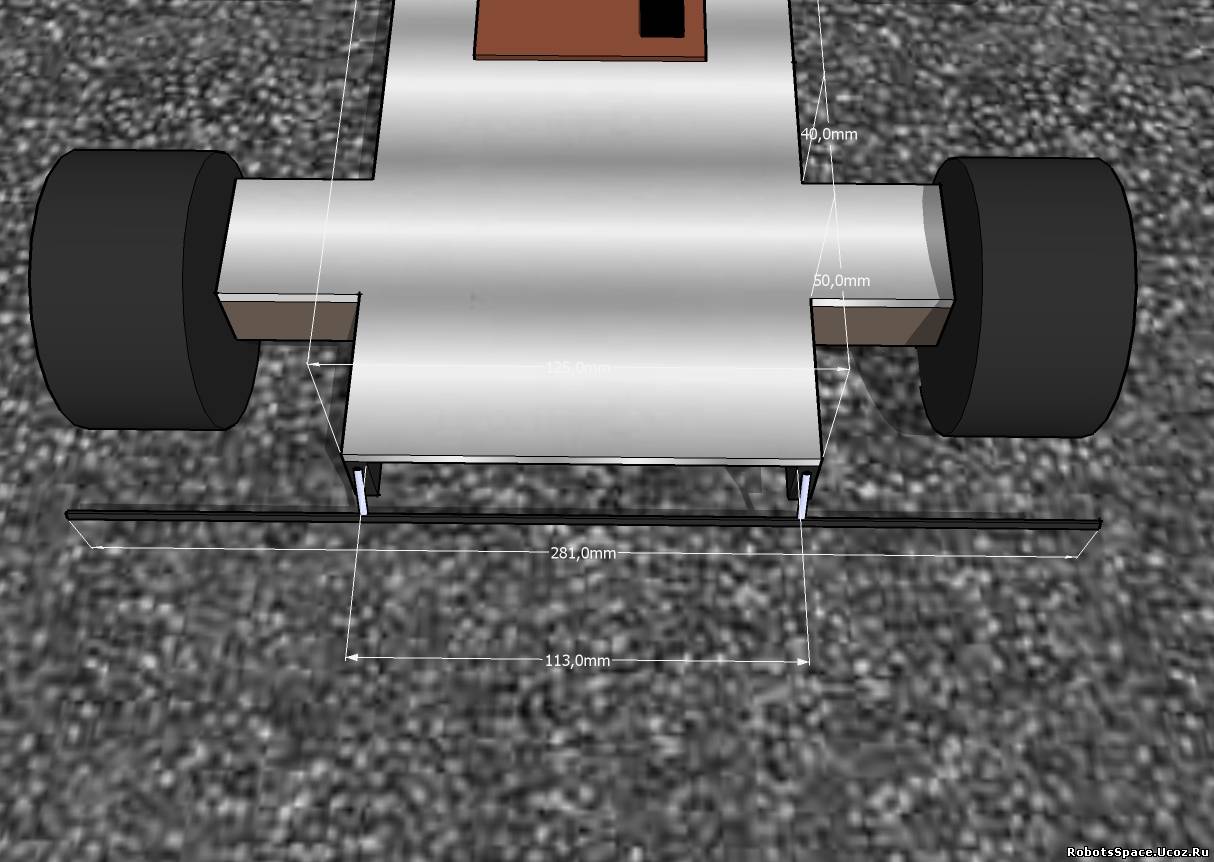
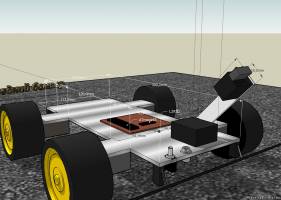
| Вот что пока выходит в 3Д. Колёса теже просто без шипов
|
| |
| |
|
| Les | Дата: Вторник, 22.04.2008, 21:22 | Сообщение # 6 |
|
|
|
| |
| |
| Doniak | Дата: Среда, 23.04.2008, 09:35 | Сообщение # 7 |
Язык программированя: CodeVisionAVR Си
Зарегистрирован 19.03.2008
Группа: Модераторы
Сообщений: 584
Город: Кривой Рог (Днепропетровск)
Статус: Offline
| 
ведущими все будут калёса?
|
| |
| |
| Space | Дата: Среда, 23.04.2008, 14:03 | Сообщение # 8 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Да. Через недели 2 пойду и куплю ещё 2 сервы и переделаю их.
|
| |
| |
| Space | Дата: Пятница, 25.04.2008, 22:34 | Сообщение # 9 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
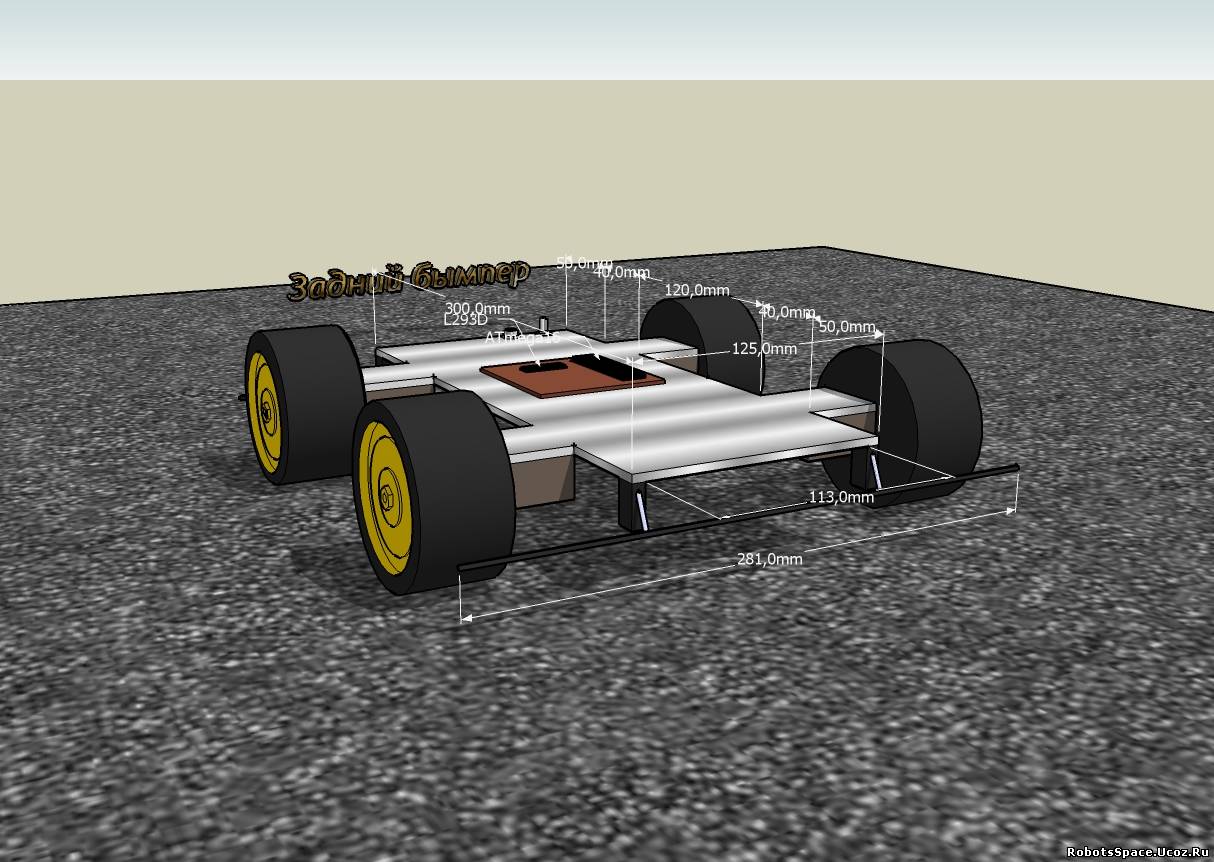
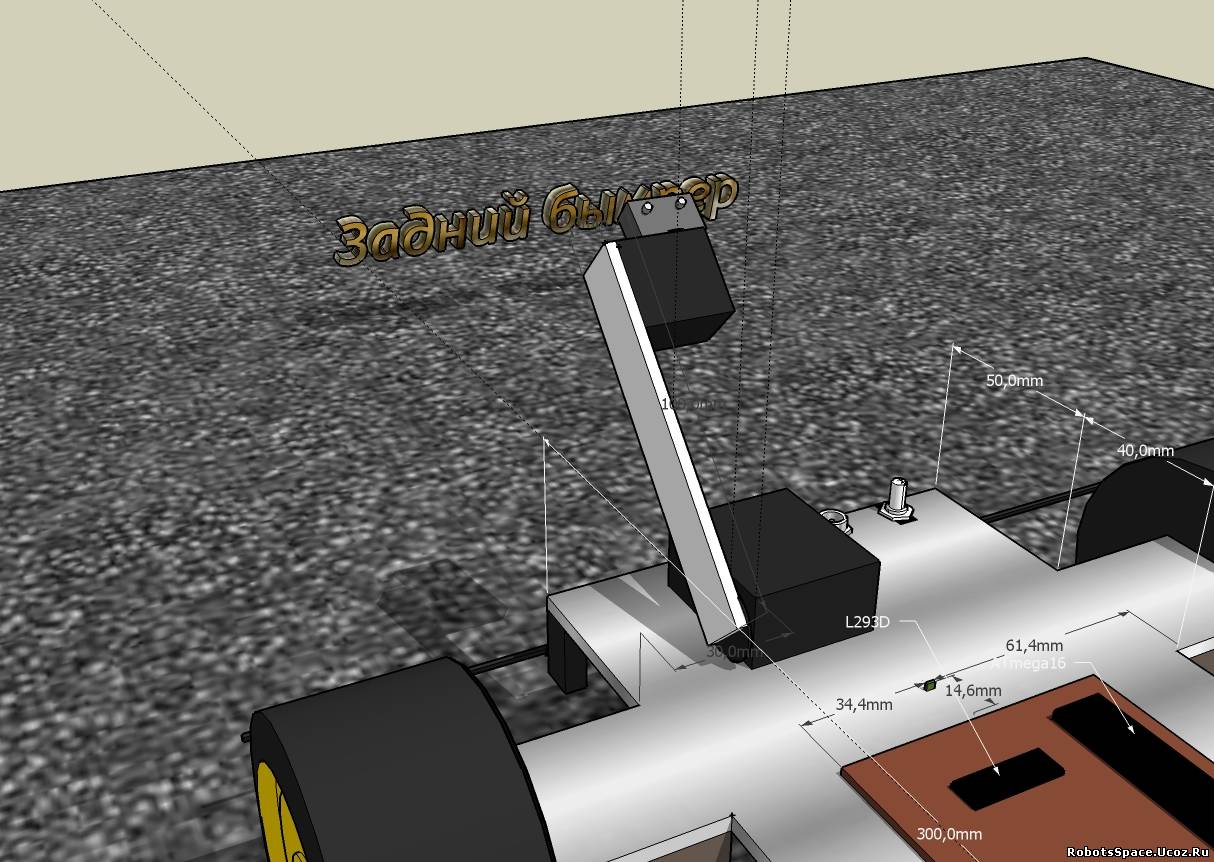
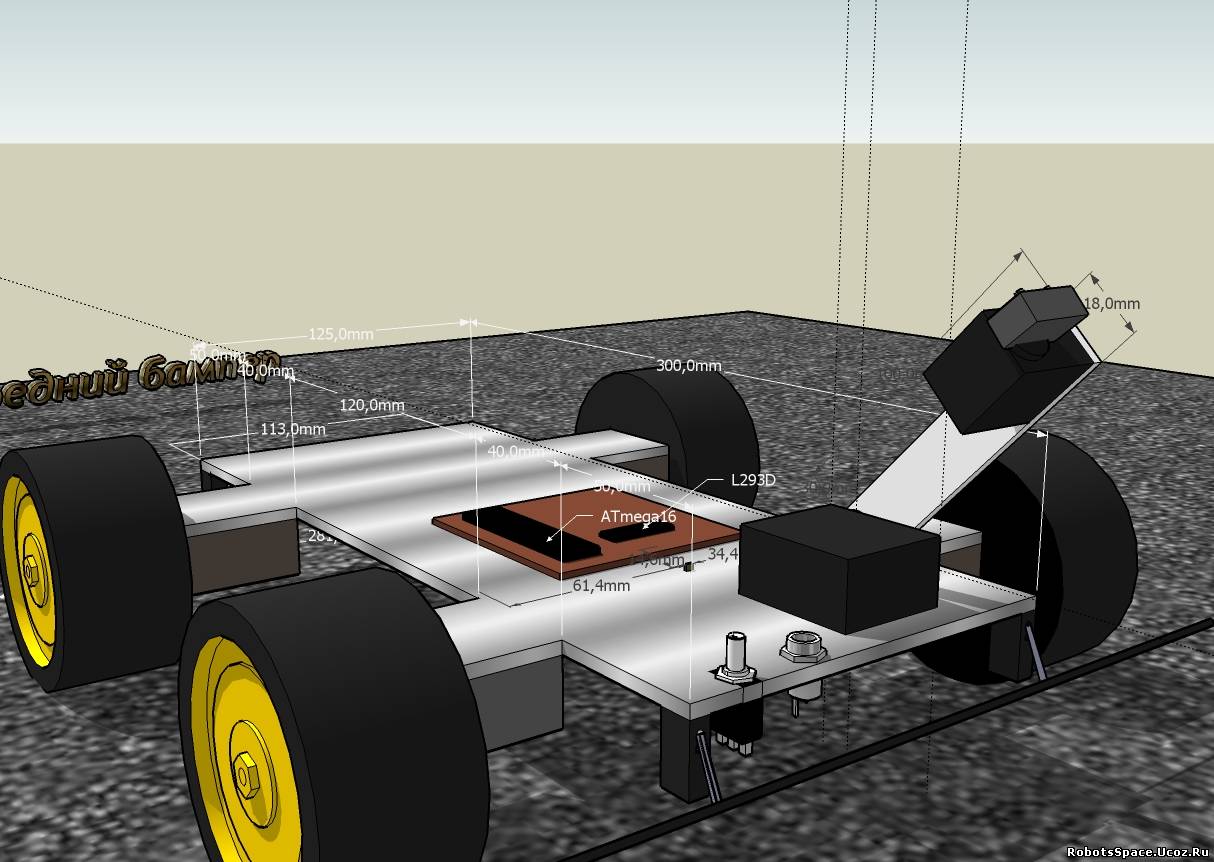
| Вот окончательный вариант. Если всё получится, то робот будет выглядить именно так
|
| |
| |
| Les | Дата: Воскресенье, 27.04.2008, 16:53 | Сообщение # 10 |
|
| Классно  . Только серву вверху лучше убрать . Только серву вверху лучше убрать  . Так как когда робот будет видеть свет, то надо делать так чтобы серва останавливалась. Вообщем это глупо чтобы серва вертелась на право и на лево. Лучше оставь одну внизу. Сделай так чтобы она поднимала датчики, то вверх, то вниз, а когда робот увидет свет, то серва остановится. Так будет лучше , но это только моё мнение. Там сам решай как хочешь . Так как когда робот будет видеть свет, то надо делать так чтобы серва останавливалась. Вообщем это глупо чтобы серва вертелась на право и на лево. Лучше оставь одну внизу. Сделай так чтобы она поднимала датчики, то вверх, то вниз, а когда робот увидет свет, то серва остановится. Так будет лучше , но это только моё мнение. Там сам решай как хочешь
|
| |
| |
| Space | Дата: Вторник, 29.04.2008, 21:51 | Сообщение # 11 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
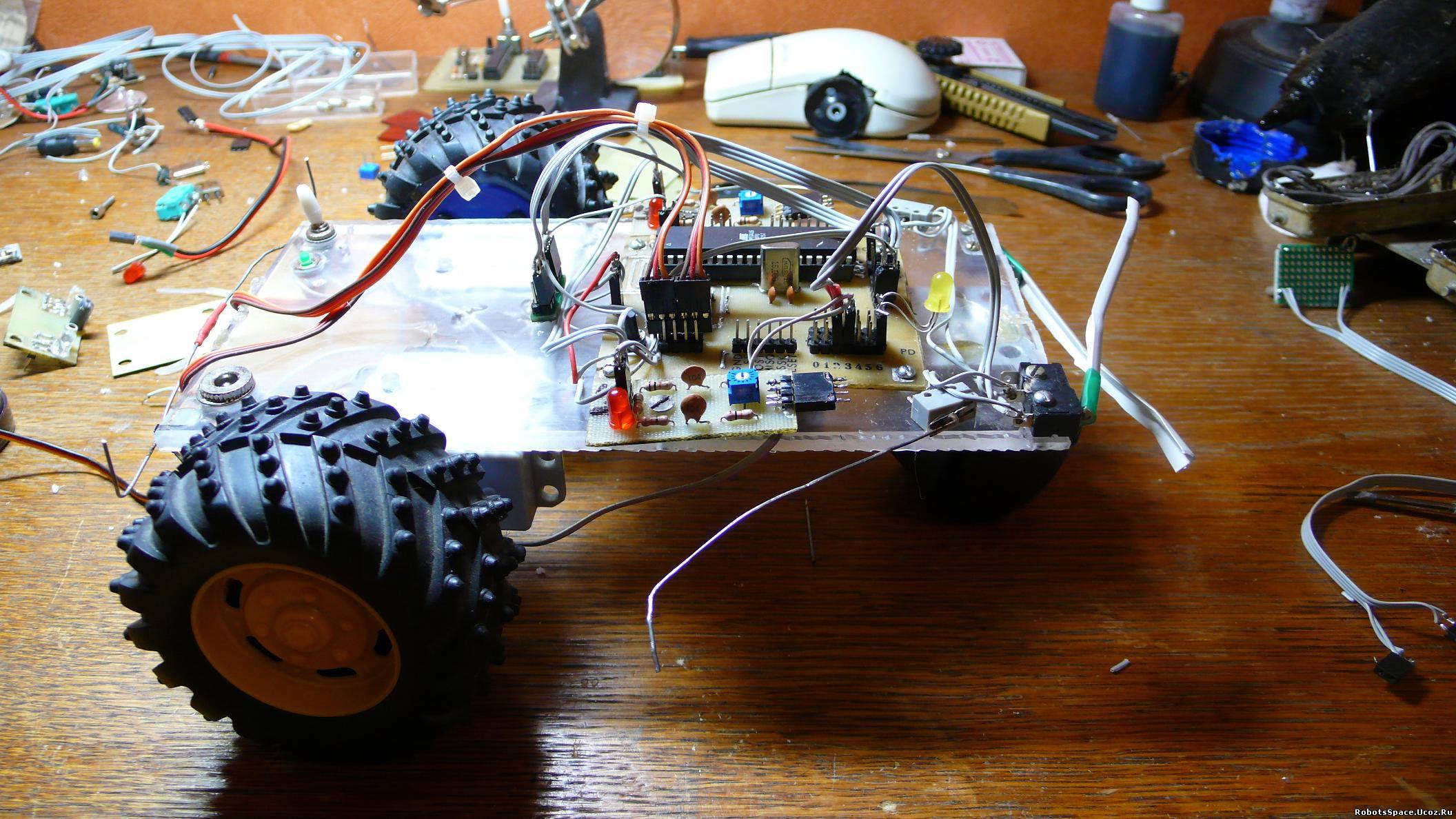
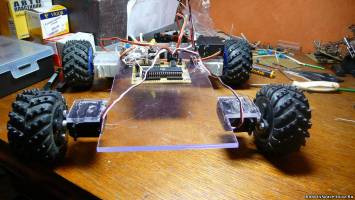
| Кстати да. Ну значит так и сделаю.
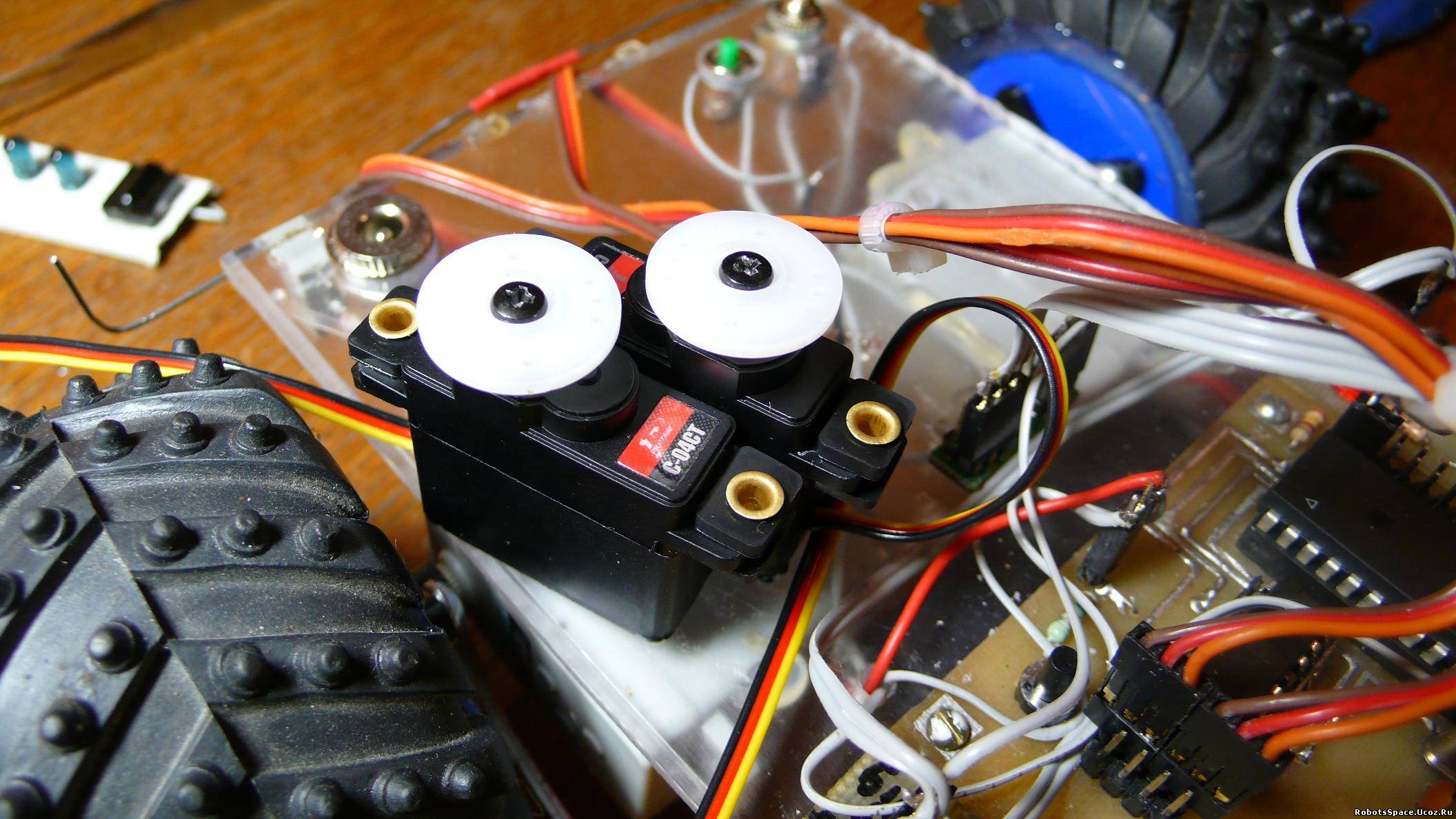
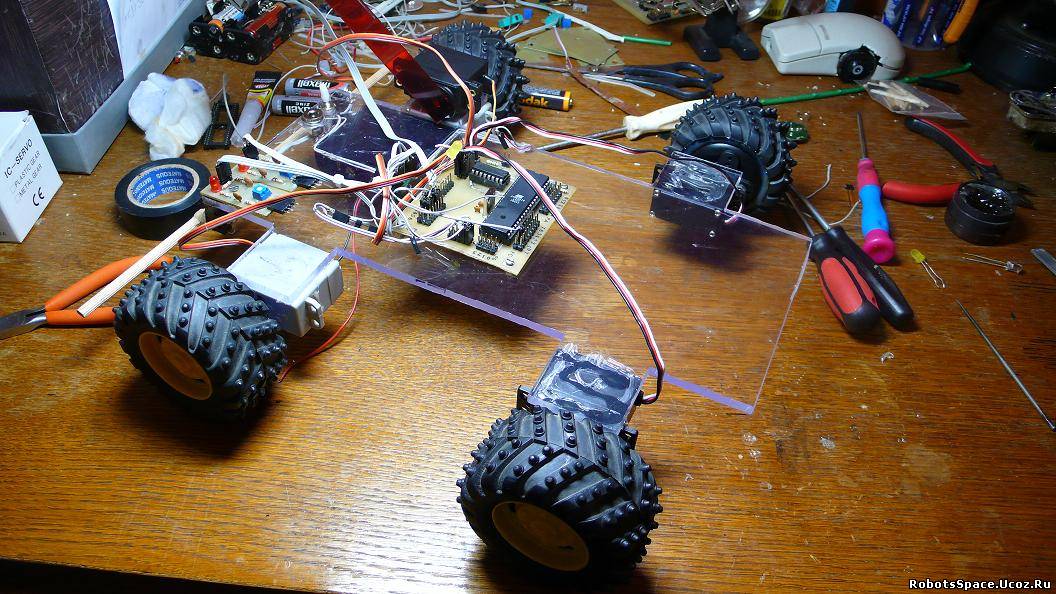
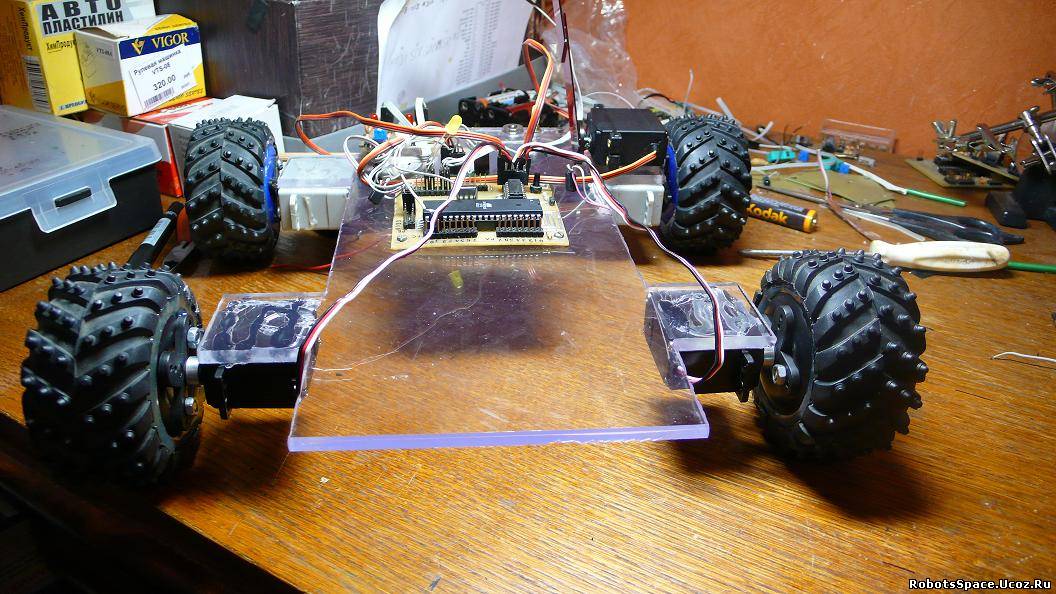
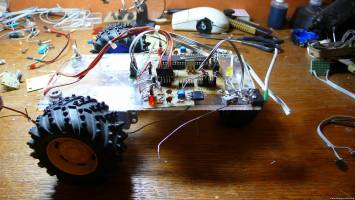
И вот наконец дошли руки до самой платформы. Сегодня её вырезал. И поставил для вида 2 сервы
Вот:
 
|
| |
| |
| Space | Дата: Пятница, 02.05.2008, 19:56 | Сообщение # 12 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
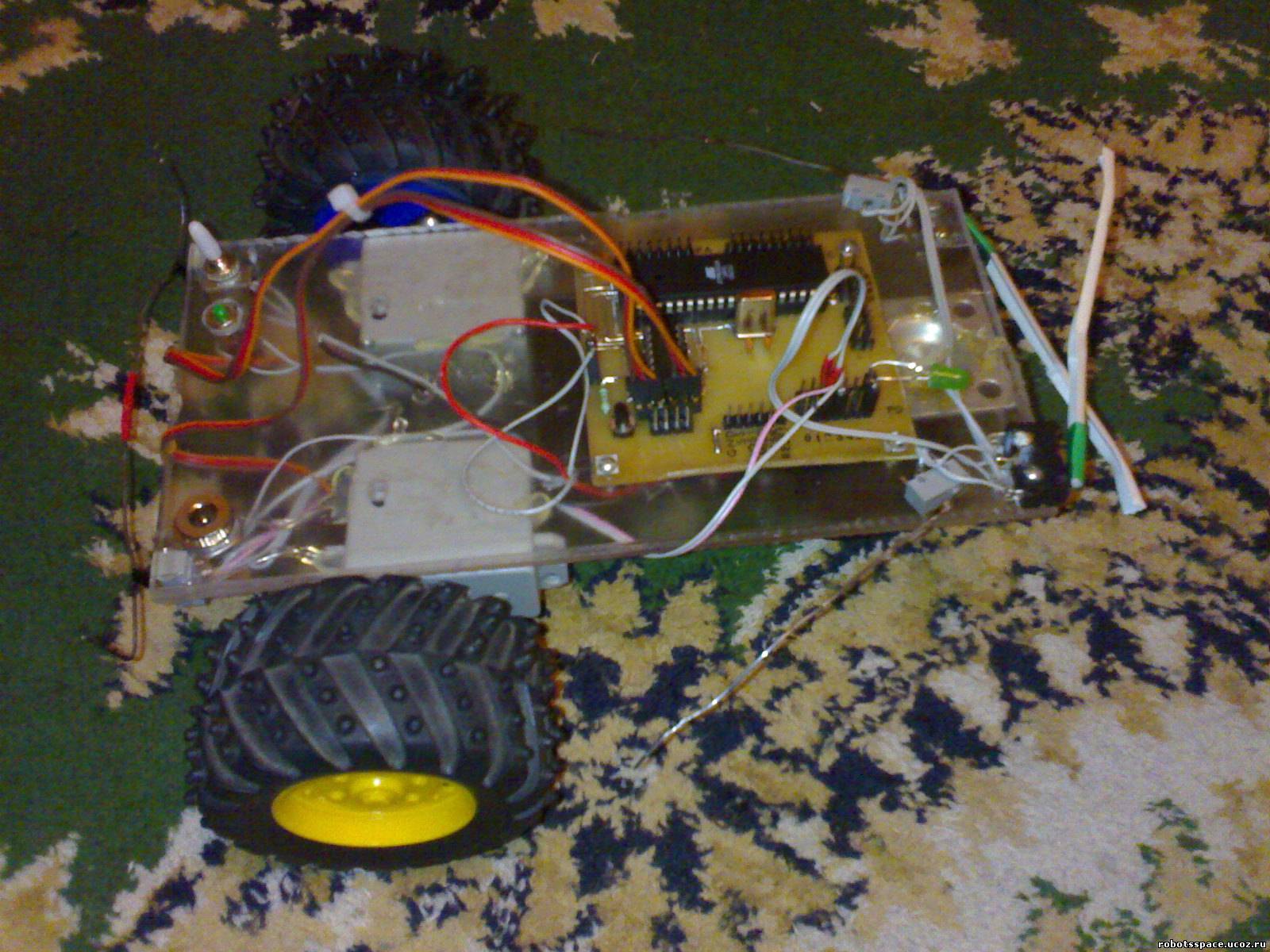
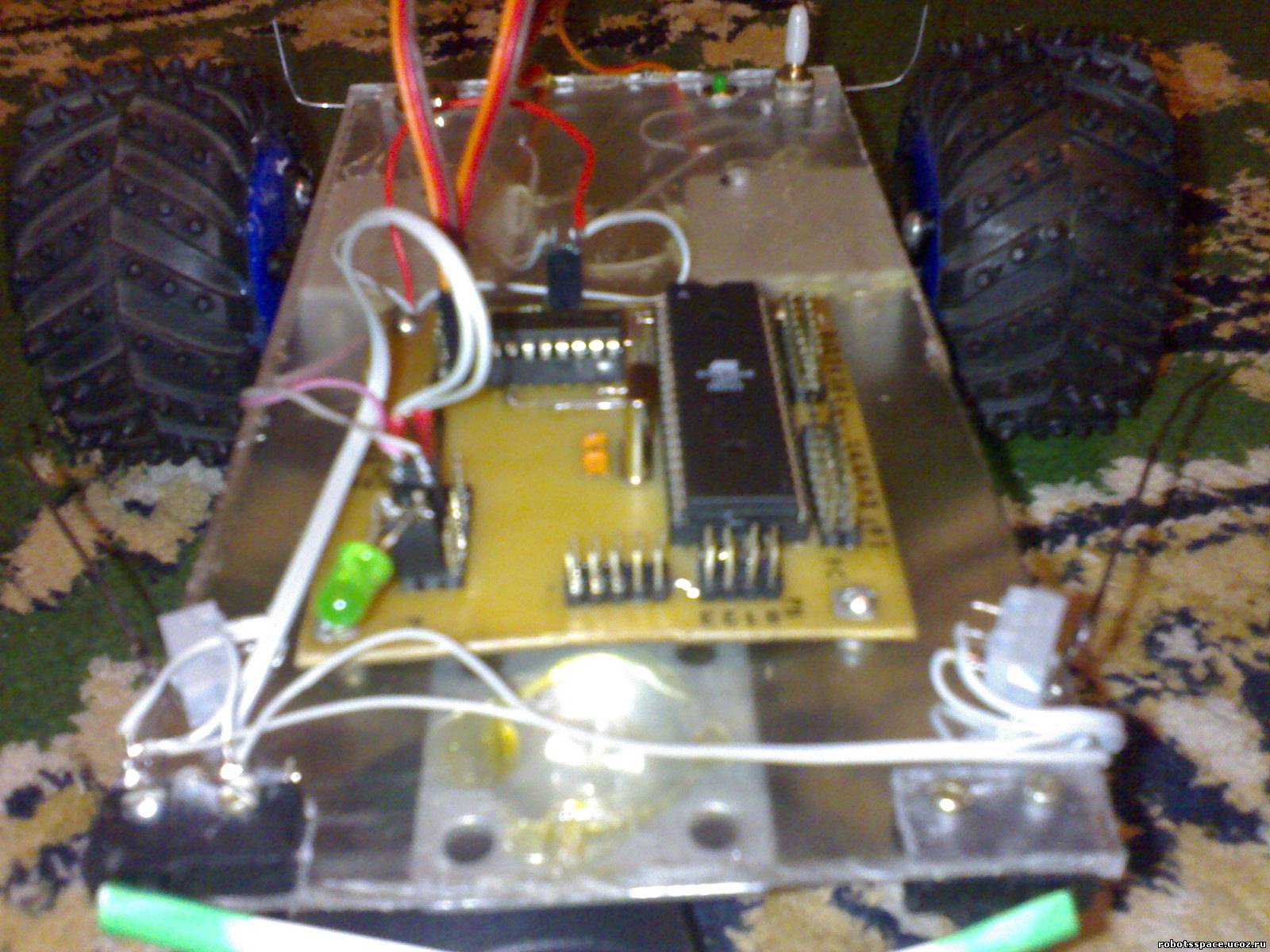
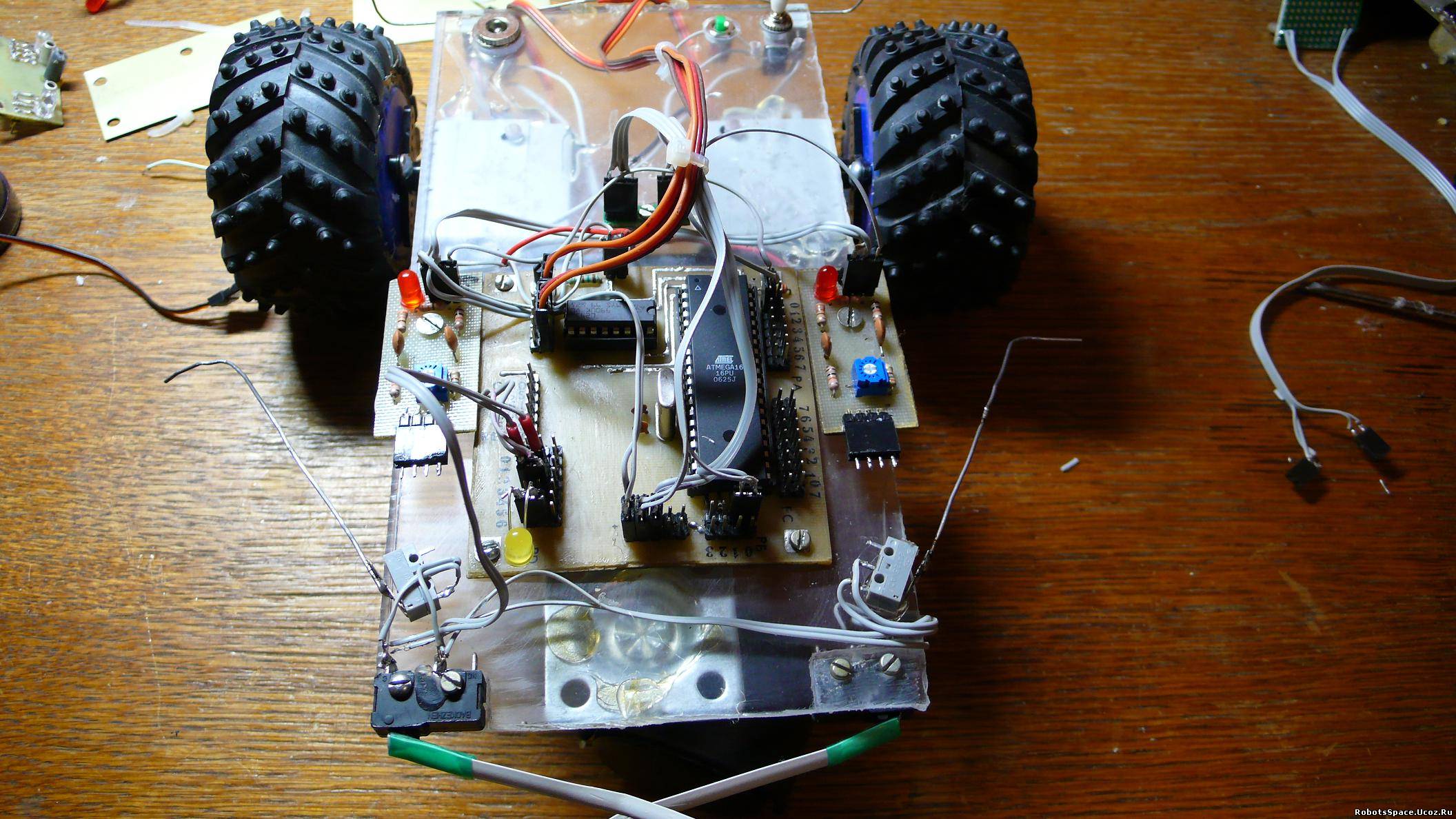
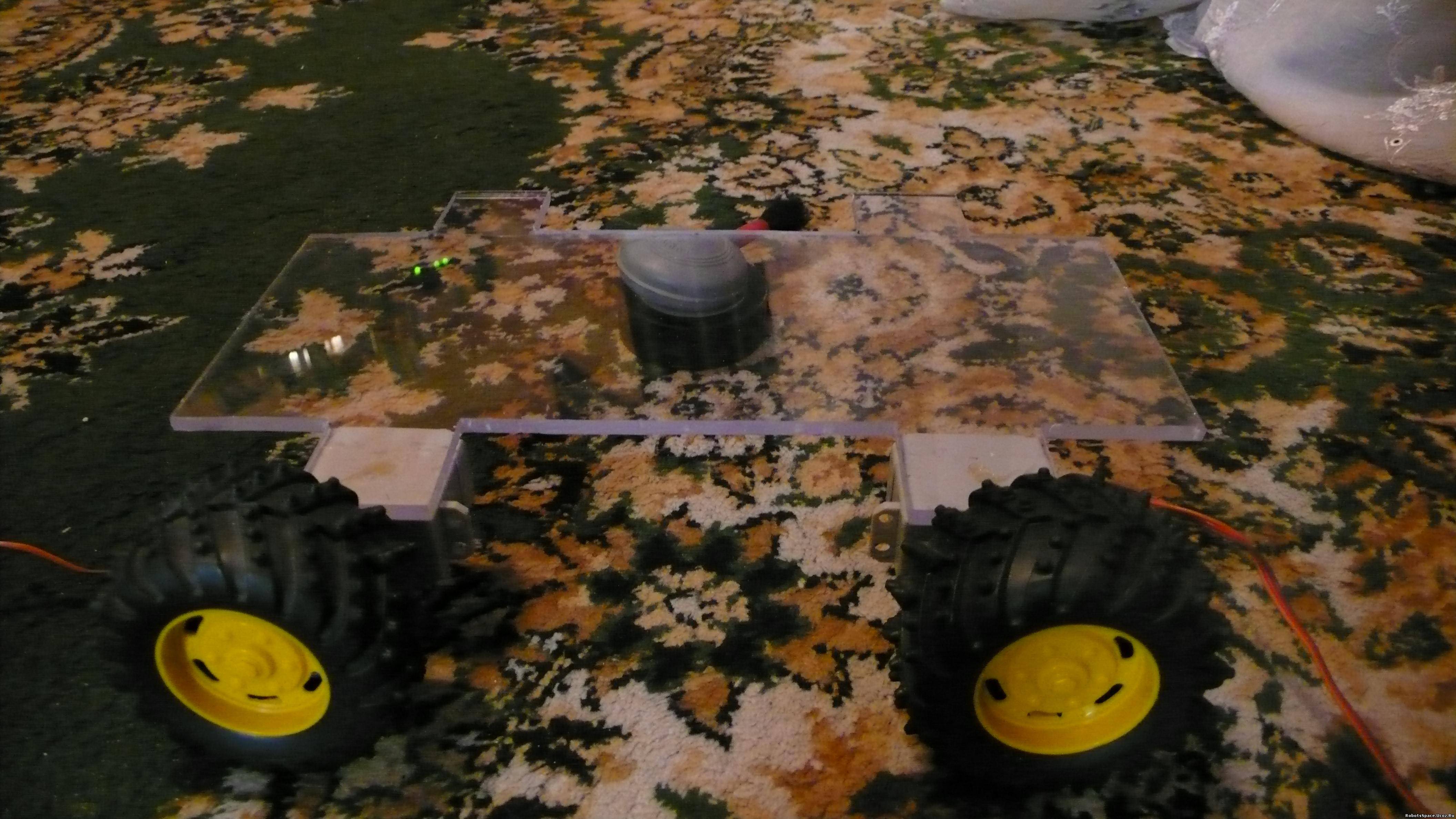
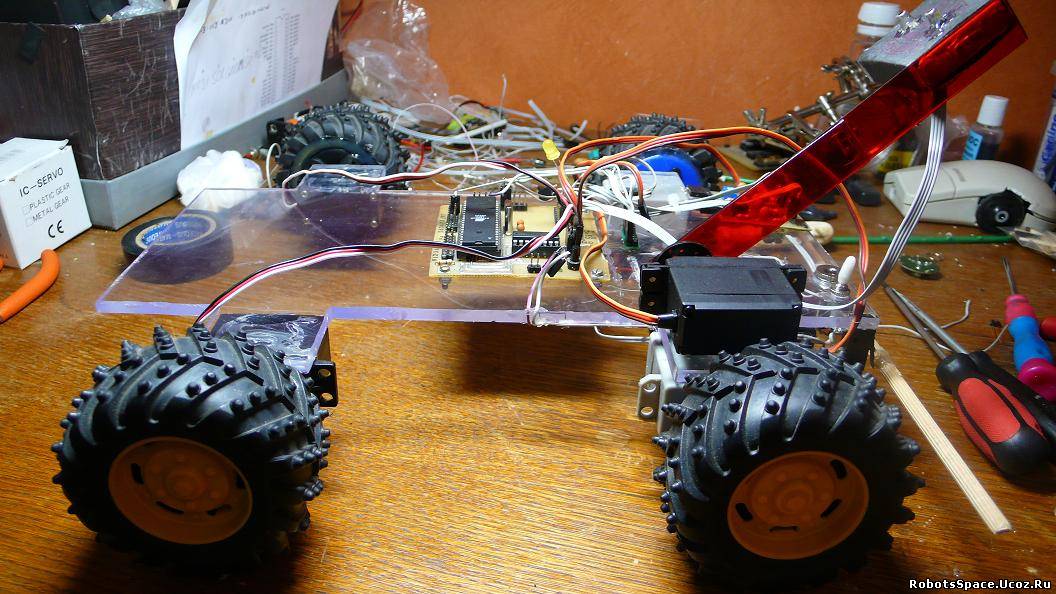
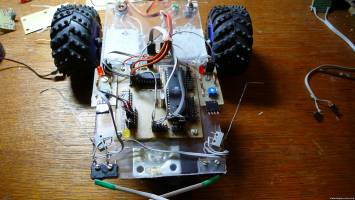
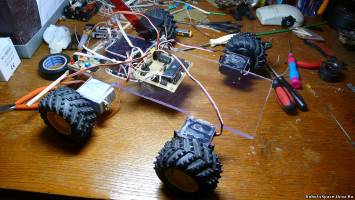
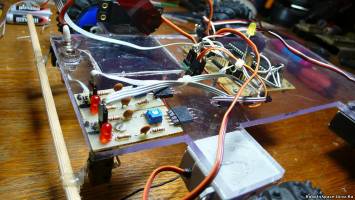
| Ну вот мой монстр. Иначе не назавёш
Не хватает пока только переднего бампера и нескольких датчиков. Ну и куска программки для работы сервы. Она есть только надо в ней разобраться чтоб всё работало 
А вот и он 
|
| |
| |
| Space | Дата: Суббота, 03.05.2008, 17:48 | Сообщение # 13 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
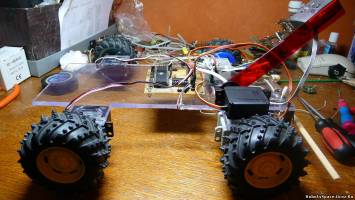
| Что скажите? Снял на видео как переползает через препятствие
|
| |
| |
| Doniak | Дата: Суббота, 03.05.2008, 18:35 | Сообщение # 14 |
Язык программированя: CodeVisionAVR Си
Зарегистрирован 19.03.2008
Группа: Модераторы
Сообщений: 584
Город: Кривой Рог (Днепропетровск)
Статус: Offline
| а как нащёт поворота? 
|
| |
| |
| Space | Дата: Суббота, 03.05.2008, 19:14 | Сообщение # 15 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| а повороты потом. у меня с сервой проблема. шестерня сломалось, а то что на видео там стоит сломанная шестерня немного подкленная поэтому всё нормально работало
|
| |
| |