|
Робот следующий за линией, на логическом элементе К155ЛН1
|
|
| S-T-A-L-K-E-R | Дата: Суббота, 28.11.2009, 16:24 | Сообщение # 1 |
Язык программированя: Мурманская область
Зарегистрирован 11.06.2009
Группа: Модераторы
Сообщений: 367
Город: Никель
Статус: Offline
| Приветствую всех, решил на днях собрать простенького робота на L293D и К155ЛН1.
Схема и описание тут и тут Начнем пока с основного, то есть с "основы". Наш робот должен быть очень вертким, и не пропускать линию: Разберем и прочистем все шестеренки и мотор от грязи и прочей ерунды, которая мешает нормальному функционированию редукторов  Скрепляем два редуктора вместе   Крепим опорное колесо  Укрепляем конструкцию  Получаем в итоге  Далее мы будем устанавливать электронную часть бота. Продолжение следует...
Оригинал статьи
http://rassionrobots.ucoz.ru/ -"Робототехника"
|
| |
| |
| ALHIMIK | Дата: Воскресенье, 29.11.2009, 00:23 | Сообщение # 2 |
Язык программированя: C - вот Истинная вера для МК
Зарегистрирован 23.12.2008
Группа: Опытные
Сообщений: 83
Город: СПб
Статус: Offline
| гы у меня такоеже подруливающие колесо
|
| |
| |
| S-T-A-L-K-E-R | Дата: Воскресенье, 29.11.2009, 01:28 | Сообщение # 3 |
Язык программированя: Мурманская область
Зарегистрирован 11.06.2009
Группа: Модераторы
Сообщений: 367
Город: Никель
Статус: Offline
| 
http://rassionrobots.ucoz.ru/ -"Робототехника"
|
| |
| |
| S-T-A-L-K-E-R | Дата: Пятница, 04.12.2009, 21:20 | Сообщение # 4 |
Язык программированя: Мурманская область
Зарегистрирован 11.06.2009
Группа: Модераторы
Сообщений: 367
Город: Никель
Статус: Offline
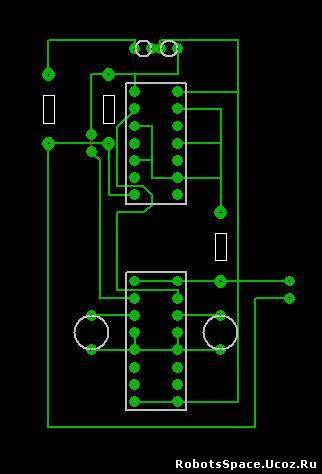
| Народ, можете проверить мою схему, собранную в спринте по схеме Картинка:
http://rassionrobots.ucoz.ru/ -"Робототехника"
|
| |
| |
| pashteet | Дата: Пятница, 04.12.2009, 22:21 | Сообщение # 5 |
Зарегистрирован 21.09.2009
Группа: Новички
Сообщений: 225
Город: Волжский
Статус: Offline
| Минус на l293 потерял Добавлено (04.12.2009, 22:21)
---------------------------------------------
еще бы увеличить ширину дорожек, а то 0.3 - несерьезно
|
| |
| |
| S-T-A-L-K-E-R | Дата: Пятница, 04.12.2009, 23:08 | Сообщение # 6 |
Язык программированя: Мурманская область
Зарегистрирован 11.06.2009
Группа: Модераторы
Сообщений: 367
Город: Никель
Статус: Offline
| Минус ! точно. А еще есть ошибки ?
http://rassionrobots.ucoz.ru/ -"Робототехника"
|
| |
| |
| pashteet | Дата: Пятница, 04.12.2009, 23:09 | Сообщение # 7 |
Зарегистрирован 21.09.2009
Группа: Новички
Сообщений: 225
Город: Волжский
Статус: Offline
| от делать нечего развел платку, надеюсь понравится
Добавил приятную мелочь - электролит и керамику по питанию
|
| |
| |
| S-T-A-L-K-E-R | Дата: Пятница, 04.12.2009, 23:10 | Сообщение # 8 |
Язык программированя: Мурманская область
Зарегистрирован 11.06.2009
Группа: Модераторы
Сообщений: 367
Город: Никель
Статус: Offline
| Quote (pashteet) еще бы увеличить ширину дорожек, а то 0.3 - несерьезно
Сделаю больше, простто очень мало работал с этой прогой, и еще не все про нее знаю 
http://rassionrobots.ucoz.ru/ -"Робототехника"
|
| |
| |
| pashteet | Дата: Пятница, 04.12.2009, 23:10 | Сообщение # 9 |
Зарегистрирован 21.09.2009
Группа: Новички
Сообщений: 225
Город: Волжский
Статус: Offline
| електролит - 220мкФ на 16В, керамику - 0.1мкФ
|
| |
| |
| S-T-A-L-K-E-R | Дата: Пятница, 04.12.2009, 23:14 | Сообщение # 10 |
Язык программированя: Мурманская область
Зарегистрирован 11.06.2009
Группа: Модераторы
Сообщений: 367
Город: Никель
Статус: Offline
| pashteet,
Огромное спасибо за помощь !Добавлено (04.12.2009, 23:14)
---------------------------------------------
pashteet,
непротив если я выложу на сайте ?
http://rassionrobots.ucoz.ru/ -"Робототехника"
|
| |
| |
| pashteet | Дата: Пятница, 04.12.2009, 23:26 | Сообщение # 11 |
Зарегистрирован 21.09.2009
Группа: Новички
Сообщений: 225
Город: Волжский
Статус: Offline
| Я на авторство не притендую 
|
| |
| |
| danger | Дата: Воскресенье, 06.12.2009, 07:53 | Сообщение # 12 |
Язык программированя: пока нет
Зарегистрирован 17.07.2009
Группа: Новички
Сообщений: 168
Город: Чебоксары
Статус: Offline
| я собрал того робота точнее схему работает
когда на фотодиод светиш тока правый работает ну это так и далжно быть,
а когда на фотодиод не светишь другой движок не двигается 
http://vkontakte.ru/club13643816 тыркни по ссылке
|
| |
| |
| S-T-A-L-K-E-R | Дата: Воскресенье, 06.12.2009, 10:00 | Сообщение # 13 |
Язык программированя: Мурманская область
Зарегистрирован 11.06.2009
Группа: Модераторы
Сообщений: 367
Город: Никель
Статус: Offline
| значт неправльно гдето, а может быть с сигнальными проводам напутал, не туда подключил
http://rassionrobots.ucoz.ru/ -"Робототехника"
|
| |
| |
| danger | Дата: Воскресенье, 06.12.2009, 10:10 | Сообщение # 14 |
Язык программированя: пока нет
Зарегистрирован 17.07.2009
Группа: Новички
Сообщений: 168
Город: Чебоксары
Статус: Offline
| да всё подключил а может плату неправельно сделал
http://vkontakte.ru/club13643816 тыркни по ссылке
|
| |
| |
| S-T-A-L-K-E-R | Дата: Пятница, 05.03.2010, 12:46 | Сообщение # 15 |
Язык программированя: Мурманская область
Зарегистрирован 11.06.2009
Группа: Модераторы
Сообщений: 367
Город: Никель
Статус: Offline
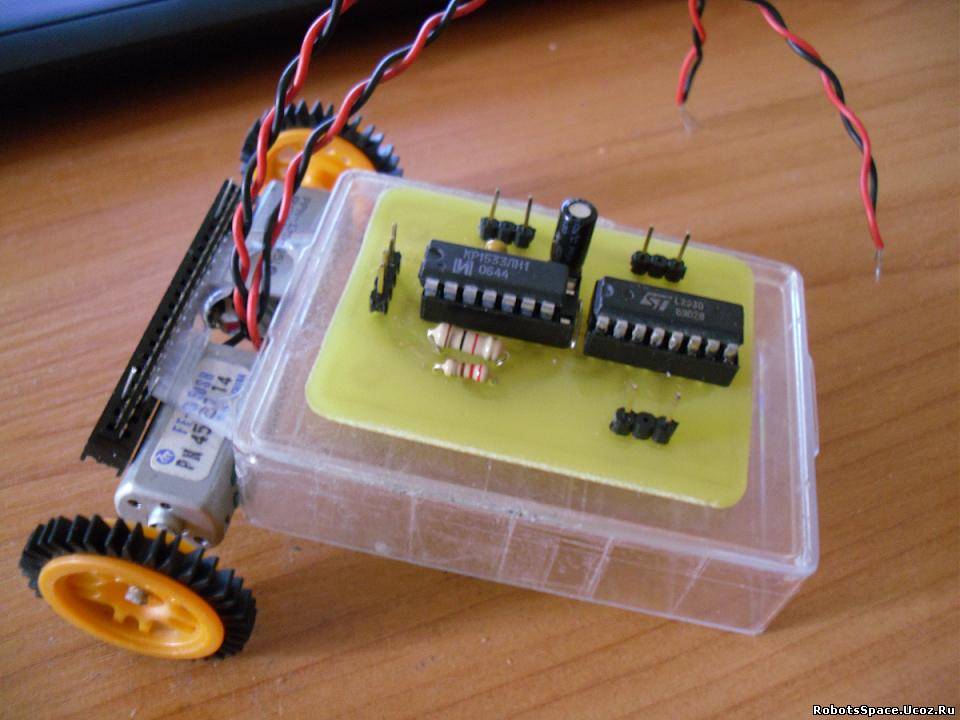
| Фото-подборка: Добавлено (05.03.2010, 12:46)
---------------------------------------------
Есть нерешенная проблема...
|
| |
| |