Этот робот сделан специально для тех кто задаёт вопросы типа: "а можно
ли сделать робота без мк?" или которые просто не хотят учить языков
программирования, или они просто не могут этого сделать. Сдесь всего
одна микросхема L293D, которую не надо программировать. Кроме неё ещё несколько кондёров, резисторов, светодиод, диод, кренка, а какие именно увидете на принципиальной схеме. Кстати вот она:
В принципе ни чего сложного. Подключая датчики на INPUT1 и INPUT4 ваш робот будет двигаться вперёд
, а подключая датчики(фотодиоды, фототранзисторы и др.) на INPUT2 и
INPUT3 робот будет двигаться назад. Все эти контакты выведены на плате,
а так же контакты под светодиоды, если ваш робот будет предназначен для
движения по линии. Только совет.
Слишком крутые повороты не делайте т. к. это не мк, который можно
настроить на любую дорожку. Только, если скорость будет низкой робот
сможет чётко следовать по ней. На быстрой скорости это не прокатит.
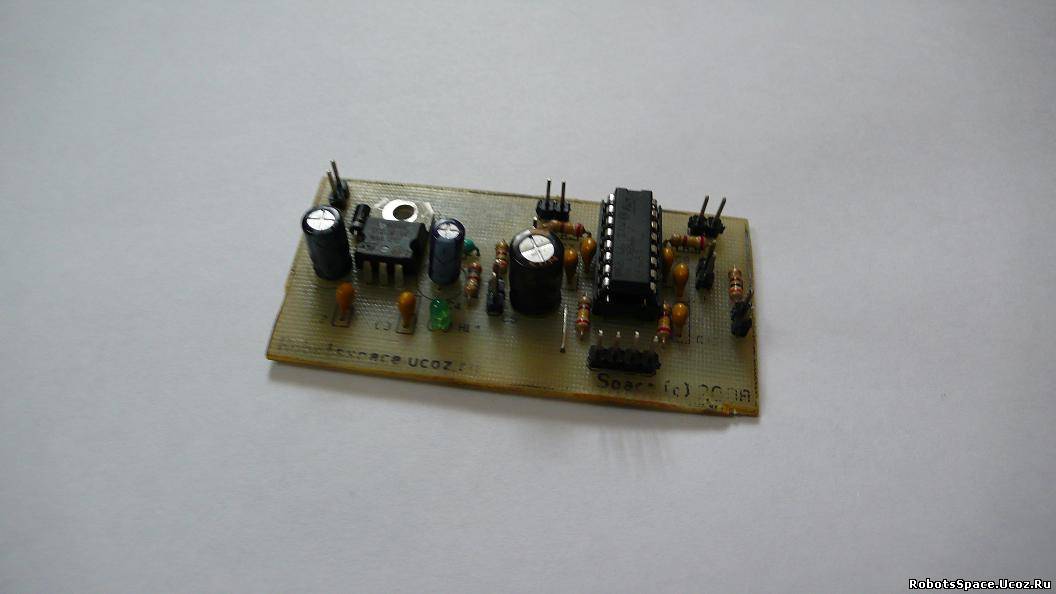
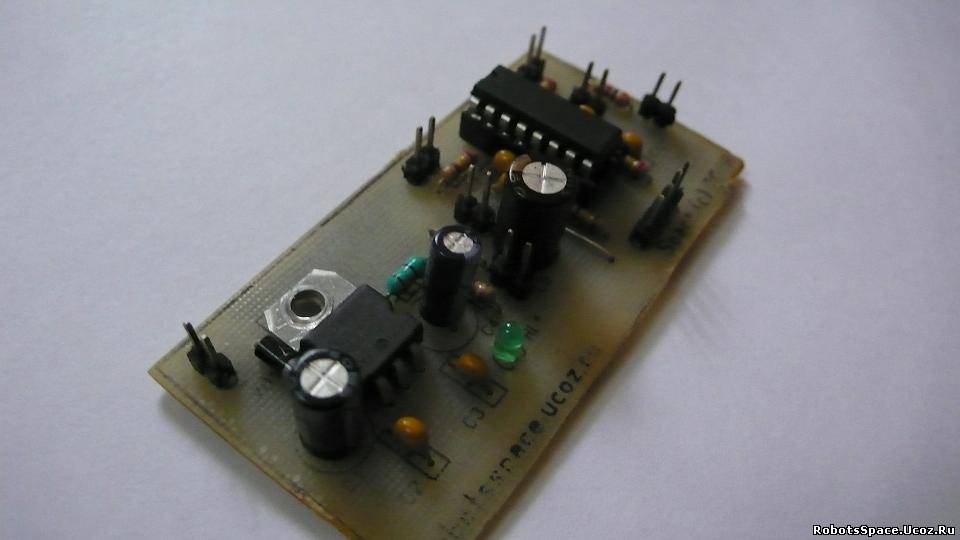
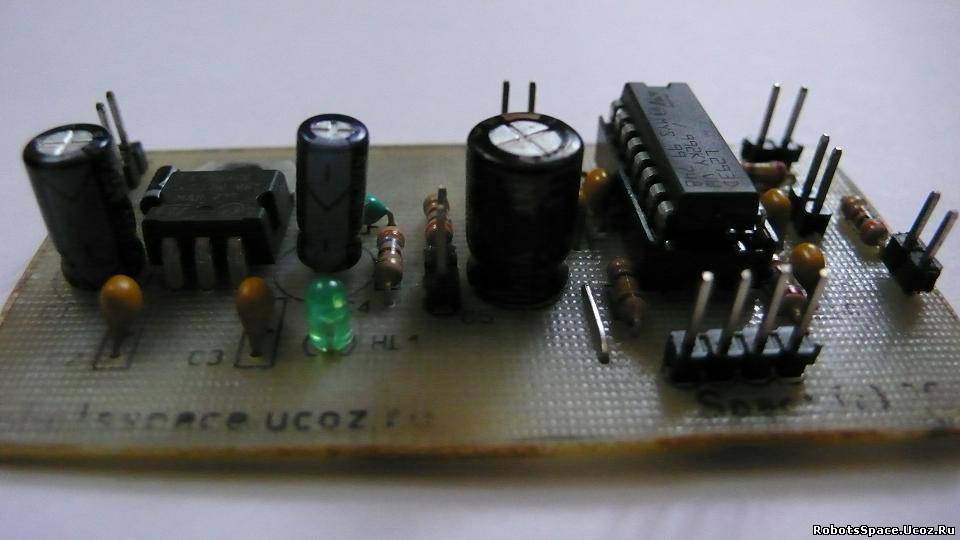
Сама плата как видете не большая. И в сборке будет интересна.
Кренка стабилизирует напряжение до пяти вольт. Максимум на схему можно
подать 12 вольт. На питание двигателей Vs максимум 35 вольт. Минимум 5.
На саму микросхему Vss максимум 5 вольт. На разведённой плате это всё
уже сделано. Всё конденсаторы установленные на плате позволяют чётко
работать всей схеме снимая все помехи, которые могут возникнуть
например от моторов. Теперь перейдём к монтажу. Я уже сделал эту плату,
а вам пока это только предстоит, если конечно захотите.


 roboforum
roboforum Кроме неё ещё несколько кондёров, резисторов, светодиод, диод, кренка, а какие именно увидете на принципиальной схеме.
Кроме неё ещё несколько кондёров, резисторов, светодиод, диод, кренка, а какие именно увидете на принципиальной схеме.  Кстати вот она:
Кстати вот она: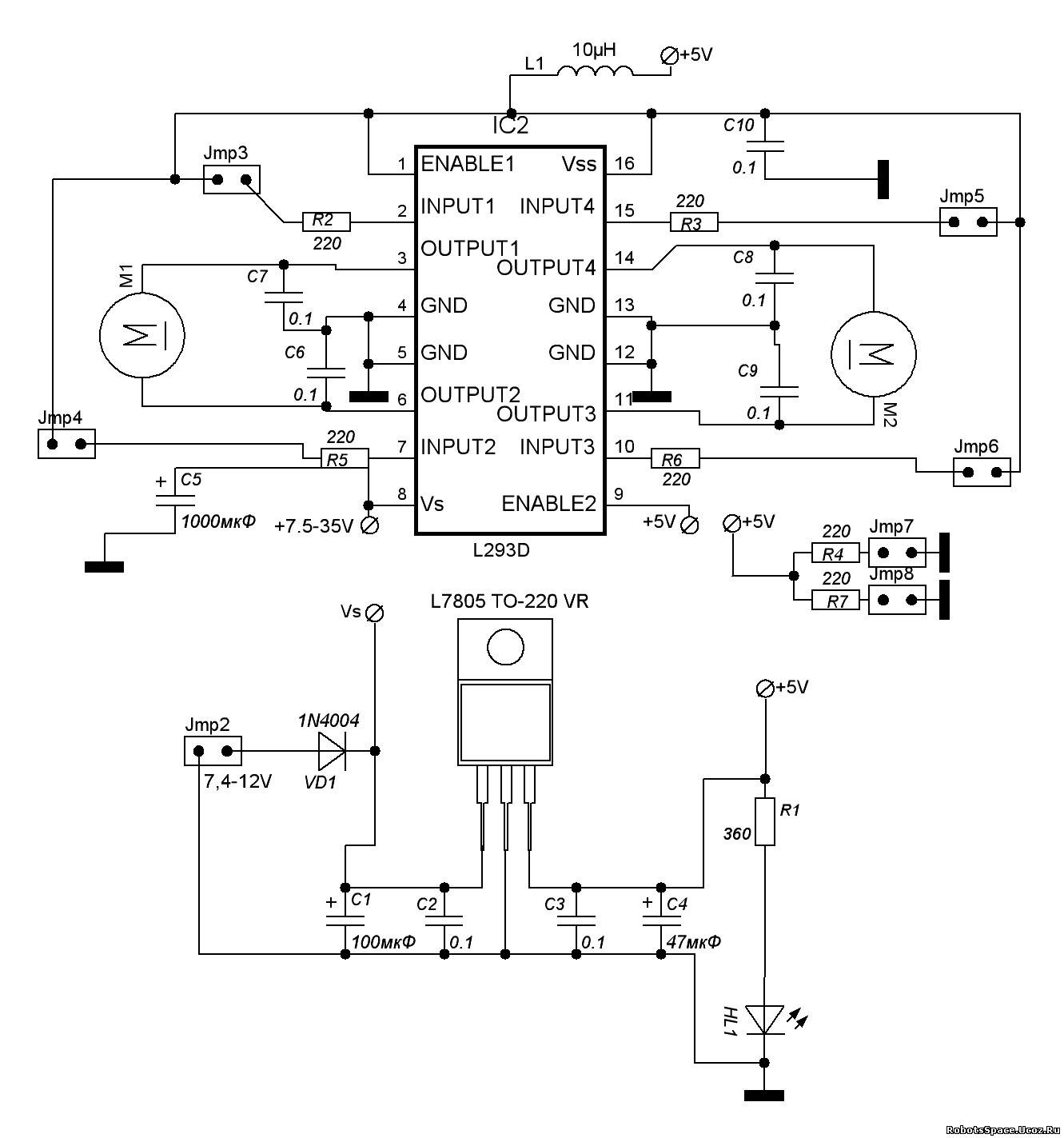
 , а подключая датчики(фотодиоды, фототранзисторы и др.) на INPUT2 и
INPUT3 робот будет двигаться назад. Все эти контакты выведены на плате,
а так же контакты под светодиоды, если ваш робот будет предназначен для
движения по линии.
, а подключая датчики(фотодиоды, фототранзисторы и др.) на INPUT2 и
INPUT3 робот будет двигаться назад. Все эти контакты выведены на плате,
а так же контакты под светодиоды, если ваш робот будет предназначен для
движения по линии.  Только совет.
Только совет.