О контроллере
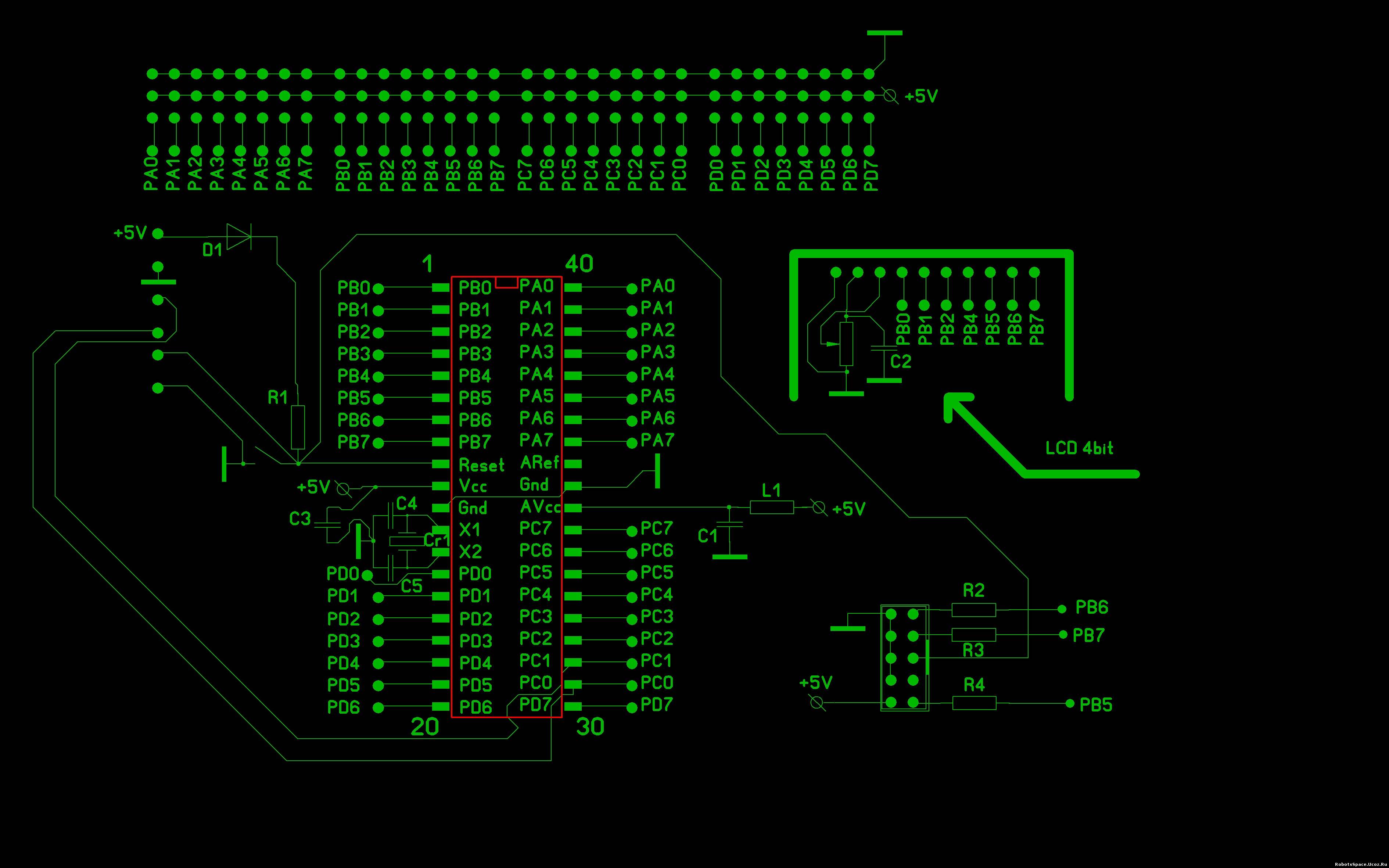
Схемотехника контроллера не
представляет из себя ничего сложного. Так как кол-во деталей не большое, то спаять такую плату будет очень легко любому новичку. Габариты так же не большие в чём плюс.
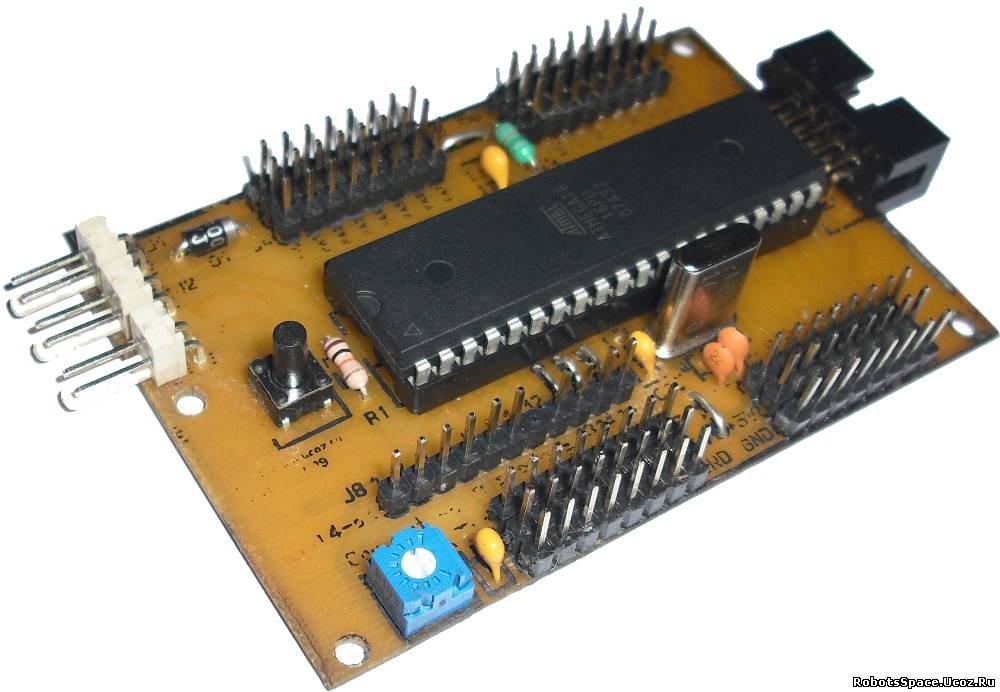
В качестве основного
микроконтроллера выступает ATMEGA16 в DIP-корпусе. Так же без каких
либо изменений в схеме можно использовать ATmega32/644. Все эти
микроконтроллеры полностью совместимы по выводам и командам.
Отличие от МRC40 в том, что нет стабилизированного питания, RS-232, но всё же есть разъём для LCD дисплея. Но это на мой взгляд даже лучше. Сделано так с целью сборки дополнительных плат. Например, блок стабилизированного питания.
Блок стабилизированного питания я выложу скоро. Он уже готов и протестирован. Работает отлично. Сделан он не только для контроллера, но и для питания других плат. Вообщем все дополнительные платы, которые я сделаю будут выложенны.
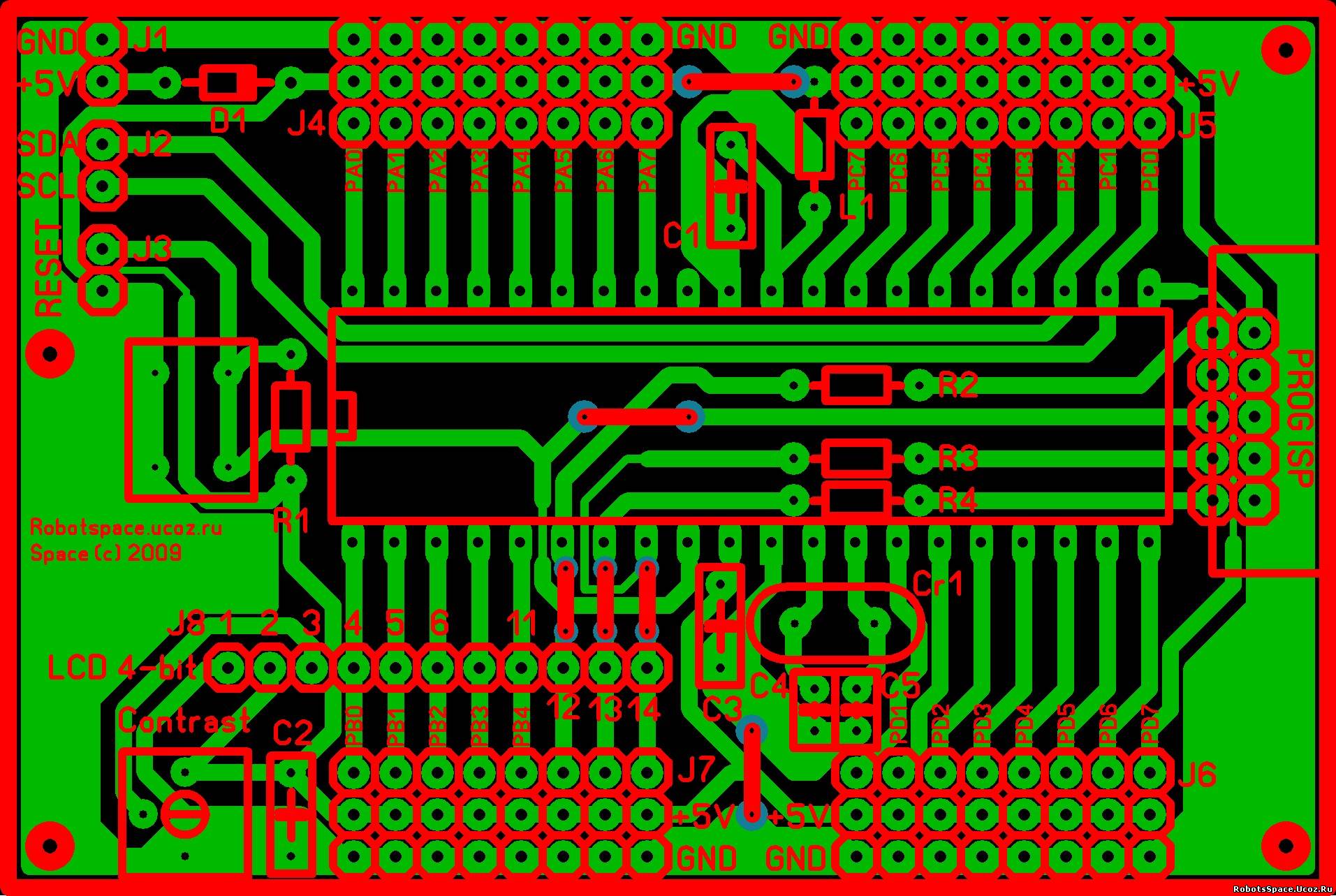
Контроллер был протестирован и показал отличную работу. В архиве можно скачать разводку, если по принципиальной схеме будут вопросы, то спрашивайте.
АРХИВ
| 

 roboforum
roboforum