|
Простая программа, а не работает! либо она тупит - либо я
|
|
| Grover | Дата: Среда, 06.02.2008, 20:02 | Сообщение # 1 |
Зарегистрирован 04.02.2008
Группа: Опытные
Сообщений: 130
Город: Воронеж
Статус: Offline
| вот код:
Code
...
...
...
int main(void) // начало основой программы
{
short i;
DDRD = 0b11111111; // все выводы порта D сконфигурировать как выходы
PORTD= 0b00000000; // по умолчаню сигнала на порт D не подается
DDRC = 0b00000000; // все выводы порта C сконфигурировать как входы
PORTC= 0b10111111; // подтягиваем все входы порта С ( все равны 1 )
delay(250);
L1:
while ((PINC & (1<<0))){ // Ждем нажатия на кнопку
}
delay(5000); // выжидаем чуть
while (1) {
M_Front(); // вперед
delay(10000);
M_Stop(); // стоп
goto L1; // вернуться к ожиданию кнопки
} // закрывающая скобка основной программы
получается что если кнопку нажать и не отпускать, то колеса постоянно крутятся!!! а если просто кликнуть, то колеса прокрутятся секунду и останавливаются!!! я думаю, может МК перегружается постоянно? Добавлено (06.02.2008, 20:02)
---------------------------------------------
Попробывал соеденить ПЛЮС через резистор 10кОм к RESET не помогло 
--------
GroverSuper.ucoz.net - мои странички.
|
| |
| |
| Space | Дата: Среда, 06.02.2008, 20:44 | Сообщение # 2 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Опиши, что программа должна делать.
А пока в этой строчке попробуй убрать while и поставь ! вот так (!(PINC & (1<<0)))
while ((PINC & (1<<0))){ // Ждем нажатия на кнопку
|
| |
| |
| Grover | Дата: Четверг, 07.02.2008, 08:44 | Сообщение # 3 |
Зарегистрирован 04.02.2008
Группа: Опытные
Сообщений: 130
Город: Воронеж
Статус: Offline
| после подключения питания бот стоит и не чего не делает.
если нажать кнопку на корпусе, то он двигается вперед и останавливается.
затем все повторяется, опять ждет кнопку...
--------
GroverSuper.ucoz.net - мои странички.
|
| |
| |
| Space | Дата: Четверг, 07.02.2008, 14:12 | Сообщение # 4 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Вот так попробуй
Code #include <avr/io.h>
/***************** Функция задержки ****************/
void delay_ms(unsigned short ms) // Минимальная задержка с кварцем 8 МГц - 1 мс
{
unsigned short i, j, k; // объявляем переменные
for (i=0; i<ms; i++) // главный цикл формирования задержки
for (j=0; j<185; j++) // вложенный цикл формирования задержки
k++; // произвольное действие
}
/****************************************************/
int main(void) // начало основной программы
{
DDRC = 0xff; // все выводы порта C сконфигурировать как выходы
DDRD = 0x00; // все выводы порта D сконфигурировать как входы
PORTD = 0xff; // установить "1" на всех выводах порта D,
// включаем подтягивающие резисторы
// ------- Основная программа ---------
// -------------- включаем моторы вперед ---------------
if (!(PIND & (1<<PIND1))) // проверить "0" на линии 1 порта D
{
PORTC |= _BV(PC1); // установить "1" на линии 1 порта C
PORTC &= ~_BV(PC2); // установить "0" на линии 2 порта C
PORTC |= _BV(PC3); // установить "1" на линии 3 порта C
PORTC &= ~_BV(PC4); // установить "0" на линии 4 порта C
delay_ms(5000);
// ----------------------------------------------------
} // закрывающая скобка бесконечного цикла
} // закрывающая скобка основной программы
} |
| |
| |
| Grover | Дата: Четверг, 07.02.2008, 16:24 | Сообщение # 5 |
Зарегистрирован 04.02.2008
Группа: Опытные
Сообщений: 130
Город: Воронеж
Статус: Offline
| логично... дома попробую.
--------
GroverSuper.ucoz.net - мои странички.
|
| |
| |
| Space | Дата: Четверг, 07.02.2008, 18:13 | Сообщение # 6 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Извеняюсь вношу поправки. ТОлько программа неполучилось всё равно. На кнопку срабатывает, но не останавливается. Выложи полностью свою программу. Покапаюсь с ней. Может и сделаю как надо.
Code #include <avr/io.h>
/***************** Функция задержки ****************/
void K_Delay_ms(unsigned short ms) // Минимальная задержка с кварцем 8 МГц - 1 мс
{
unsigned short i, j, k; // объявляем переменные
for (i=0; i<ms; i++) // главный цикл формирования задержки
for (j=0; j<185; j++) // вложенный цикл формирования задержки
k++; // произвольное действие
}
/****************************************************/
int main(void) // начало основной программы
{
DDRC = 0xff; // все выводы порта C сконфигурировать как выходы
DDRD = 0x00; // все выводы порта D сконфигурировать как входы
PORTD = 0xff; // установить "1" на всех выводах порта D,
// включаем подтягивающие резисторы
// ------- Основная программа ---------
// -------------- включаем моторы вперед ---------------
while(1) {
if (!(PIND | (1<<PIND1))) // проверить "1" на линии 1 порта D
{
PORTC |= _BV(PC1); // установить "1" на линии 1 порта C
PORTC |= _BV(PC2); // установить "1" на линии 2 порта C
PORTC |= _BV(PC3); // установить "1" на линии 3 порта C
PORTC |= _BV(PC4); // установить "1" на линии 4 порта C
// ----------------------------------------------------
}
if (!(PIND & (1<<PIND1))) // проверить "0" на линии 1 порта D
{
PORTC |= _BV(PC1); // установить "1" на линии 1 порта C
PORTC &= ~_BV(PC2); // установить "0" на линии 2 порта C
PORTC |= _BV(PC3); // установить "1" на линии 3 порта C
PORTC &= ~_BV(PC4); // установить "0" на линии 4 порта C
K_Delay_ms(1500);
// ----------------------------------------------------
} // закрывающая скобка бесконечного цикла
} // закрывающая скобка основной программы
} |
| |
| |
| Grover | Дата: Четверг, 07.02.2008, 19:19 | Сообщение # 7 |
Зарегистрирован 04.02.2008
Группа: Опытные
Сообщений: 130
Город: Воронеж
Статус: Offline
| нашел место неисправности - не знаю как исправить: у меня не правильно работает функция K_Delay_ms();
Она работает не в миллисекундах и вообще каждый раз по разному? т.е. что-бы задержка была примерно в 1 секунду надо написать:
K_Delay_ms(10 000); а в 5 секунд: K_Delay_ms(100 000); пипец!!! вот полный код программы:
Code
#include <avr/io.h>
#include <avr/delay.h>
#define F_CPU 8000000UL // 8 MHz
/***************** Функция задержки ****************/
void K_Delay_ms(unsigned short ms) // Минимальная задержка с кварцем 8 МГц - 1 мс
{
unsigned short i, j, k; // объявляем переменные
for (i=0; i<ms; i++) // главный цикл формирования задержки
for (j=0; j<185; j++) // вложенный цикл формирования задержки
k++; // произвольное действие
}
/****************************************************/
void M_Front(void)
{
PORTD |= _BV(PD0); // установить "1"
PORTD |= _BV(PD1); // установить "1"
PORTD &=~_BV(PD2); // установить "0"
PORTD |= _BV(PD3); // установить "1"
PORTD &=~_BV(PD4); // установить "0"
}
void M_Stop(void)
{
PORTD &= ~_BV(PD0); // установить "0"
PORTD &= ~_BV(PD1); // установить "0"
PORTD &= ~_BV(PD2); // установить "0"
PORTD &= ~_BV(PD3); // установить "0"
PORTD &= ~_BV(PD4); // установить "0"
}
int main(void) // начало основой программы
{
short i;
DDRD = 0b11111111; // все выводы порта D сконфигурировать как выходы
PORTD= 0b00000000; // по умолчаню сигнала на порт D не подается
DDRC = 0b00000000; // все выводы порта C сконфигурировать как входы
PORTC= 0b10111111; // подтягиваем все входы порта С ( все равны 1 )
while (1) {
if (!(PINC & (1<<0))){
M_Front();
K_Delay_ms(100000);
M_Stop();
}
}
} // закрывающая скобка основной программы
может дело в схеме?
--------
GroverSuper.ucoz.net - мои странички.
|
| |
| |
| Space | Дата: Четверг, 07.02.2008, 21:47 | Сообщение # 8 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| С этим временем я тожет не могу разобраться. Поэтому проверяю всё на практике и устанавливаю нужное время.
А почему их 5, когда должно быть по идеи всего 4
Code {
PORTD |= _BV(PD0); // установить "1"
PORTD |= _BV(PD1); // установить "1"
PORTD &=~_BV(PD2); // установить "0"
PORTD |= _BV(PD3); // установить "1"
PORTD &=~_BV(PD4); // установить "0"
} |
| |
| |
| Grover | Дата: Пятница, 08.02.2008, 08:38 | Сообщение # 9 |
Зарегистрирован 04.02.2008
Группа: Опытные
Сообщений: 130
Город: Воронеж
Статус: Offline
| а. на моей схеме я к порту PD0 подключил оба пина Enable микрухи L293D - это для большей функциональности. а с паузой надо разобраться... Добавлено (08.02.2008, 08:38)
---------------------------------------------
В примерах к WinAVR нашел вот такую функцию:
Code
static void
delay_1s(void)
{
uint8_t i;
for (i = 0; i < 100; i++)
_delay_ms(10);
}
Как видно из названия функции, рна реализовывает задержку в 1 секунду по средствам другой функции.
я немного переделал функцию. Теперь она называется delay_10ms(), в скобках необходимо указать сколько раз по 10мс надо сделать паузу, т.е. секунда = 100. можно поробывать в строке _delay_ms(10); вместо 10 написать 1 тогда теоретически будет работать в миллисекундах, но я думаю, что обработка цикла отбирает некоторое время МК и задержка менее 10 мс будет приводить к неточности, хотя надо попробывать. Вот что у меня получилось:
Code
void delay_10ms(unsigned short m)
{
unsigned short i;
for (i = 0; i < m; i++)
_delay_ms(10);
}
вечером попробую.
--------
GroverSuper.ucoz.net - мои странички.
|
| |
| |
| Space | Дата: Пятница, 08.02.2008, 16:09 | Сообщение # 10 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Ты хотябы продемонстрируй на фото или видео на чем всё пробуешь и как это работает 
|
| |
| |
| Grover | Дата: Пятница, 08.02.2008, 20:39 | Сообщение # 11 |
Зарегистрирован 04.02.2008
Группа: Опытные
Сообщений: 130
Город: Воронеж
Статус: Offline
| вот мое творение - первый и опытный образец. сейчас даже датчиков нет - просто катается (почти  ) )
собран на монтажной плате...
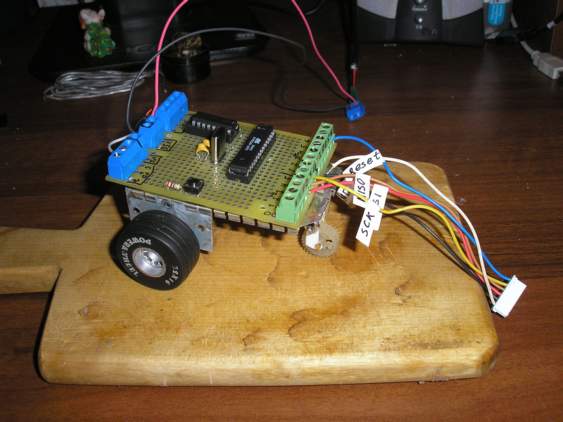  Добавлено (08.02.2008, 20:39)
---------------------------------------------
там проводочек со штекером болтается - это к программатору (на коннекторах под болты).
питание от USB 
Редукторов нет - странно, но он и так ездиет - не догонишь.
--------
GroverSuper.ucoz.net - мои странички.
|
| |
| |
| Space | Дата: Пятница, 08.02.2008, 20:40 | Сообщение # 12 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
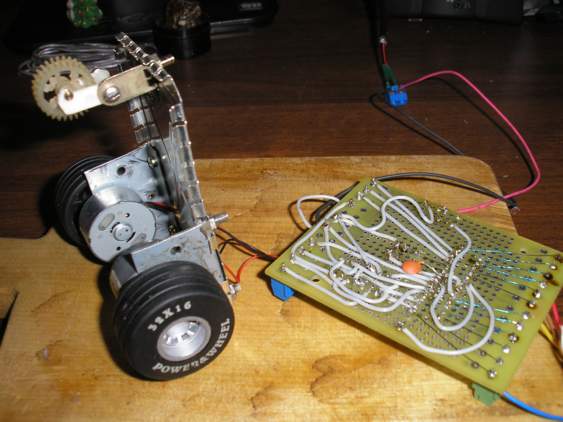
| Класс. Только, что у тебя моторы на прямую к моторам подсоединены или через редукторэ 
|
| |
| |
| Space | Дата: Пятница, 08.02.2008, 20:52 | Сообщение # 13 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Странно насколько я знаю эти моторы очень хилые. Я удивлён , что они тянут всё это. Но если положишь сверху хотябы 4 аккумулятора, то врятли. <_<
В принципе для проверки сойдёт.
|
| |
| |
| Grover | Дата: Пятница, 08.02.2008, 21:01 | Сообщение # 14 |
Зарегистрирован 04.02.2008
Группа: Опытные
Сообщений: 130
Город: Воронеж
Статус: Offline
| я накаркал  вперед и назад он даже с батарейками ездиет, а вот повороты не осилил - нужны редукторы!!!
--------
GroverSuper.ucoz.net - мои странички.
|
| |
| |
| Space | Дата: Пятница, 08.02.2008, 21:05 | Сообщение # 15 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| Бывает. Сам когда начинал долго мучался с этим
|
| |
| |








