Эта простейшая конструкция-шутка может доставить много радости и веселья тому, кто попробует ее повторить, хотя она довольно часто падает. Робот не использует никаких причудливых акселерометров или гироскопов и балансирует при помощи всего одного простейшего механического датчика, представляющего собой микропереключатель с лапкой.
Когда робот собирается упасть, лапка микропереключателя касается земли и двигатель начинает перемещать робота в направлении, в котором он собирался падать. Лапка отпускается и робот начинает перемещаться в обратную сторону, осуществляя балансирование.
Возможно, Вы имеете все части, чтобы сделать этого робота прямо сейчас.
Для изготовления робота понадобится:
небольшой электрический двигатель,
несколько шестеренок (или мотор с редуктором),
ось и два колеса,
небольшой лист пластмассы,
два держателя батарей на две батареи АА,
4 AA батареи,
старая литиевая батареечка,
выключатель,
микропереключатель с лапкой,
несколько проводков,
паяльник
и немного клея.
http://myrobot.ru/news...._02.jpg
http://myrobot.ru/news...._03.jpg
http://myrobot.ru/news...._05.jpg
http://myrobot.ru/news...._06.jpg
http://myrobot.ru/news...._07.jpg
http://myrobot.ru/news...._10.jpg
К лапке микропереключателя припаивают старую литиевую батарейку.
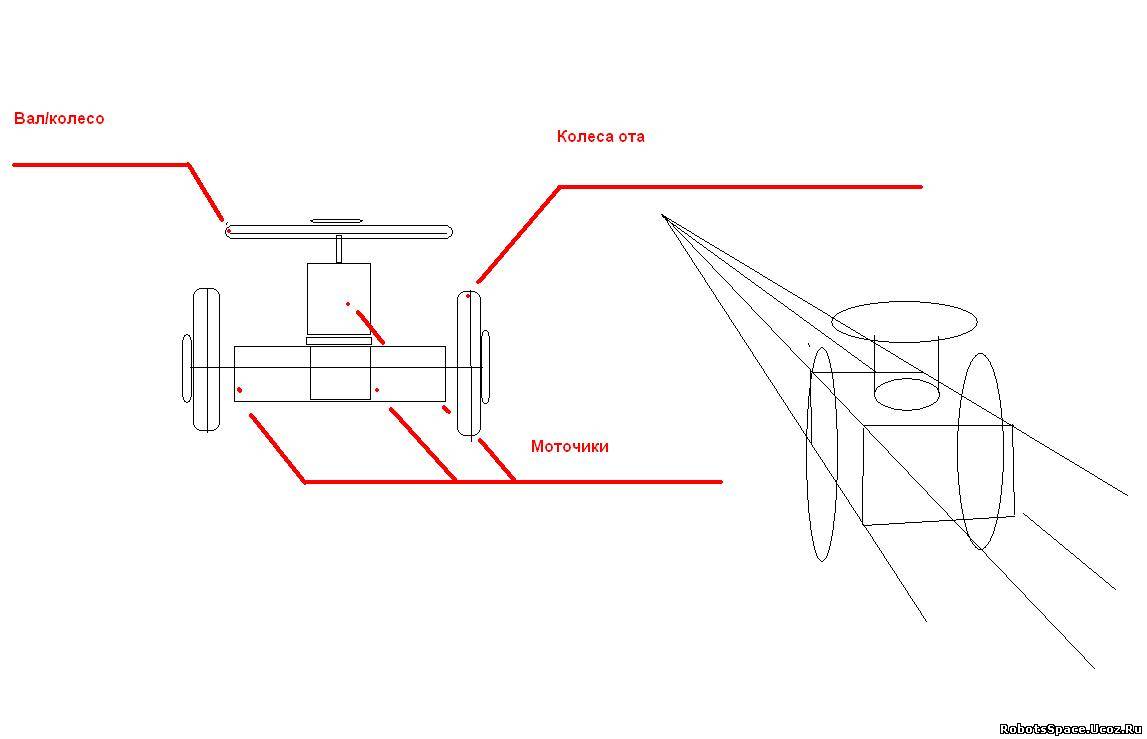
Схема балансирующего робота.
Качество балансирования робота зависит от позиции сенсора. При настройке робота попытайтесь изменить позицию микропереключателя так, чтобы сделать работу робота более уверенной.