|
Как собрать робота новичку?
|
|
| sasha | Дата: Вторник, 03.03.2009, 14:47 | Сообщение # 16 |
Язык программированя: Си и баском(учусь)
Зарегистрирован 16.02.2009
Группа: Новички
Сообщений: 371
Город: Актюбинск
Статус: Offline
| это устройство который выполняет определенную функцию!
-=Наша_зависимость_от_роботов_возрастает_с_каждым_днем=-
|
| |
| |
| megoBOT | Дата: Вторник, 03.03.2009, 15:05 | Сообщение # 17 |
Зарегистрирован 27.02.2009
Группа: Новички
Сообщений: 17
Город: голицино
Статус: Offline
| а РОБОКОНТРОЛЕР тоже самое
|
| |
| |
| Doniak | Дата: Вторник, 03.03.2009, 19:50 | Сообщение # 18 |
Язык программированя: CodeVisionAVR Си
Зарегистрирован 19.03.2008
Группа: Модераторы
Сообщений: 584
Город: Кривой Рог (Днепропетровск)
Статус: Offline
| Микроконтроллер (MCU) — микросхема, предназначенная для управления электронными устройствами. Типичный микроконтроллер сочетает в себе функции процессора и периферийных устройств, может содержать ОЗУ и ПЗУ. По сути, это однокристальный компьютер, способный выполнять простые задачи. Использование одной микросхемы, вместо целого набора, как в случае обычных процессоров, применяемых в персональных компьютерах, значительно снижает размеры, энергопотребление и стоимость устройств, построенных на базе микроконтроллеров. Микроконтроллеры являются основой для построения встраиваемых систем, их можно встретить во многих современных приборах, таких, как телефоны, стиральные машины и т. п. Бо́льшая часть выпускаемых в мире процессоров — микроконтроллеры.
|
| |
| |
| megoBOT | Дата: Вторник, 03.03.2009, 20:48 | Сообщение # 19 |
Зарегистрирован 27.02.2009
Группа: Новички
Сообщений: 17
Город: голицино
Статус: Offline
| а робоконтролер?
|
| |
| |
| -KibARG- | Дата: Вторник, 03.03.2009, 21:02 | Сообщение # 20 |
Зарегистрирован 30.01.2009
Группа: Новички
Сообщений: 64
Город: Kyiv
Статус: Offline
| На робоконтролере находится сам МК, его обвязка, порты для програмирования и общения с компом, стабилизатор напряжения, и распаяные выходы от каждой ножки МК
|
| |
| |
| FireFly | Дата: Вторник, 03.03.2009, 22:22 | Сообщение # 21 |
Зарегистрирован 04.04.2008
Группа: Модераторы
Сообщений: 196
Город: Kamyshin
Статус: Offline
| еще один тролль... нашествие прям однако 
Robozone
|
| |
| |
| megoBOT | Дата: Среда, 04.03.2009, 15:29 | Сообщение # 22 |
Зарегистрирован 27.02.2009
Группа: Новички
Сообщений: 17
Город: голицино
Статус: Offline
| а где можно взять этот РОБОКОНТРОЛЕР??? и как он выглядит? 
|
| |
| |
| Space | Дата: Среда, 04.03.2009, 16:34 | Сообщение # 23 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| А вот это по твоему, что!!!
На все твои вопросы "наипростейшие" может ответить поисковик и нефига засорять форум ЗАДОЛБАЛИ УЖЕ! 
В поиске вводим например слово робоконтроллер и весь материал на блюдечке
А если не можешь найти ответа на свой вопрос, то смело можешь идти сюда
|
| |
| |
| Space | Дата: Среда, 04.03.2009, 17:06 | Сообщение # 24 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
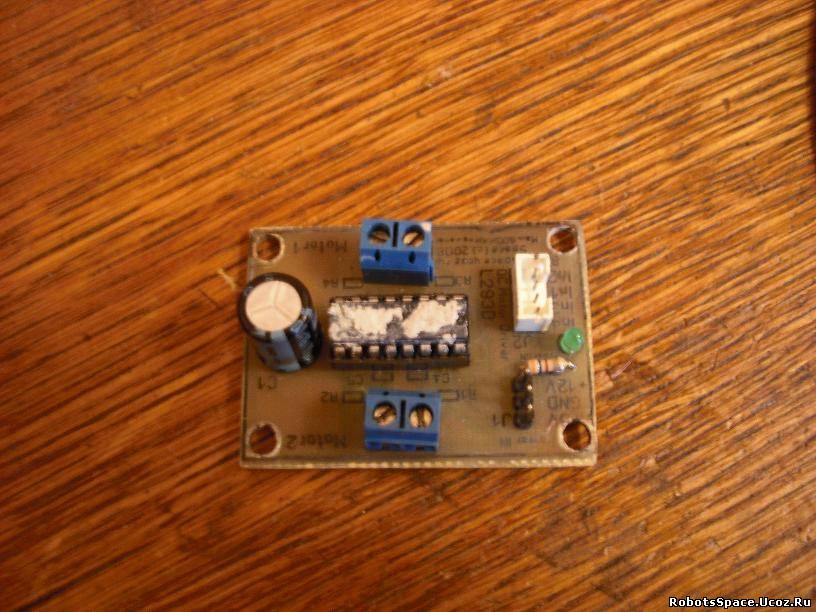
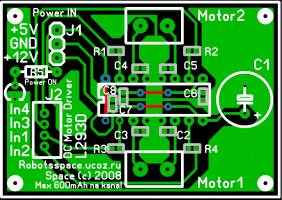
| Драйвер двигателей(разводка в архиве). Плата рабочая проверено.
Детали:
R1-R4-220 Ом
R5-360 Ом
С1-1000 мкФ 16 вольт
C2-C8-0,1 мкФ
In1-In4-надо подсоединить на выходы мк
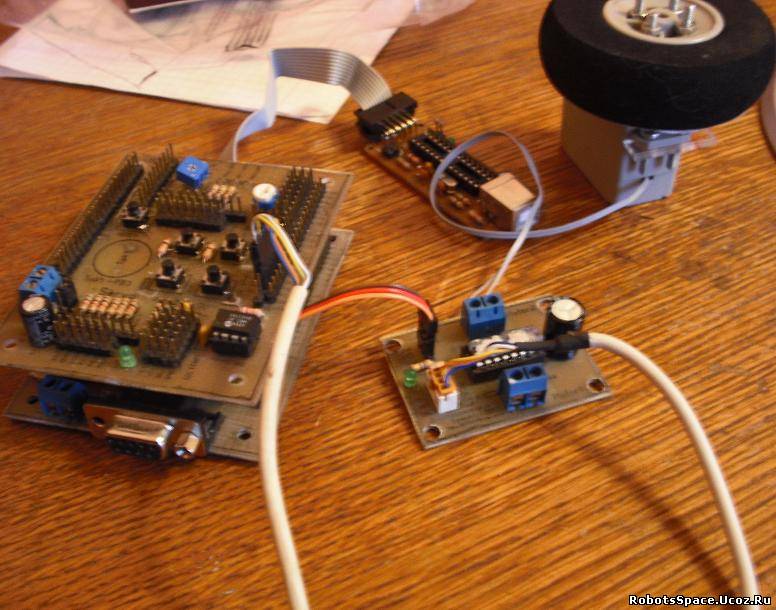
Вот так всё подключается:

Программа для теста(исходник на Bascom AVR в архиве):
Code $regfile = "m16def.dat" 'используем Mega16
$crystal = 16000000 'частота кварцевого резонатора 16mHz
Config Pina.0 = Output : Fr Alias Porta.0 'PA 0 устанавливаем на выход и присваиваем имя Fr(вперёд-вправо);
Config Pina.1 = Output : Br Alias Porta.1 'PA 1 устанавливаем на выход и присваиваем имя Br(назад-вправо);
Config Pina.2 = Output : Bl Alias Porta.2 'PA 2 устанавливаем на выход и присваиваем имя Bl(назад-влево);
Config Pina.3 = Output : Fl Alias Porta.3 'PA 3 устанавливаем на выход и присваиваем имя Fl(вперёд-влево).
Do ' Главный цикл программ
Gosub Стоп ' Переходим в подпрограмму "Стоп" и возвращаемся из неё
Wait 1 ' Задержка в секундах. В нашем случае это 1 секунда.
Gosub Вперёд ' Переходим в подпрограмму "Вперёд" и возвращаемся из неё
Wait 1
Gosub Вперёд_влево ' Переходим в подпрограмму "Вперёд_влево" и возвращаемся из неё
Wait 1
Gosub Вперёд_вправо ' Переходим в подпрограмму "Вперёд_вправо" и возвращаемся из неё
Wait 1
Gosub Назад ' Переходим в подпрограмму "Назад" и возвращаемся из неё
Wait 1
Gosub Назад_влево ' Переходим в подпрограмму "Назад_влево" и возвращаемся из неё
Wait 1
Gosub Назад_вправо ' Переходим в подпрограмму "Назад_вправо" и возвращаемся из неё
Wait 1
Gosub Вправо ' Переходим в подпрограмму "Вправо" и возвращаемся из неё
Wait 1
Gosub Влево ' Переходим в подпрограмму "Влево" и возвращаемся из неё
Wait 1
Loop
'' -----------------------------------------------------------------------------
'' Включение комбинации моторов для движения в заданном направлении
'' -----------------------------------------------------------------------------
Стоп: ' стоим на месте
Fr = 0
Br = 0
Bl = 0
Fl = 0
Return
Вперёд: ' едим вперёд
Fr = 1
Br = 0
Bl = 0
Fl = 1
Return
Вперёд_вправо: ' поварачиваем вправо
Fr = 0
Br = 0
Bl = 0
Fl = 1
Return
Вперёд_влево: ' поворачиваем влево
Fr = 1
Br = 0
Bl = 0
Fl = 0
Return
Назад: ' назад
Fr = 0
Br = 1
Bl = 1
Fl = 0
Return
Назад_вправо: ' поворачиваем назад-вправо
Fr = 0
Br = 1
Bl = 0
Fl = 0
Return
Назад_влево: ' поворачиваем назад-влево
Fr = 0
Br = 0
Bl = 1
Fl = 0
Return
Вправо: ' разворот на метсе вправо
Fr = 0
Br = 1
Bl = 0
Fl = 1
Return
Влево: ' разворот на месте влево
Fr = 1
Br = 0
Bl = 1
Fl = 0
Return
End
Позже рассмотри как рекулировать программно скорость вращения мотора с помощью ШИМа МК  (без энкодера) (без энкодера)
Что есть энкодер?
Читаем подробно тут
Что есть ШИМ?
Это Широтно-импульсная модуляция
|
| |
| |
| Tren | Дата: Суббота, 07.03.2009, 19:51 | Сообщение # 25 |
Зарегистрирован 25.01.2009
Группа: Новички
Сообщений: 31
Город: Гатчина
Статус: Offline
| А можно лучше собрать этот программатор и вот этот Универсальный модуль для контроллера с Универсальный робо-контроллер MRC28?  
Я просто новичок
Сообщение отредактировал Tren - Суббота, 07.03.2009, 19:52 |
| |
| |
| юрии | Дата: Понедельник, 16.03.2009, 15:00 | Сообщение # 26 |
Язык программированя: Васик
Зарегистрирован 05.03.2009
Группа: Новички
Сообщений: 572
Город: Югорск
Статус: Offline
| Tren, а чем отличаетсся Универсальный робо-контроллер MRC-40 (ATmega 16/32/644) отУниверсальный робо-контроллер MRC28?
|
| |
| |
| Bass85 | Дата: Понедельник, 16.03.2009, 16:40 | Сообщение # 27 |
Зарегистрирован 12.02.2009
Группа: Опытные
Сообщений: 422
Статус: Offline
| Для начала разные контроллеры ставятся.
А вобще все написано читайте а потом спрашивайте.
|
| |
| |
| юрии | Дата: Понедельник, 16.03.2009, 16:51 | Сообщение # 28 |
Язык программированя: Васик
Зарегистрирован 05.03.2009
Группа: Новички
Сообщений: 572
Город: Югорск
Статус: Offline
| Вопрос а если сделать http://robozone.su/2008....40.html и поставить нанего http://robozone.su/2008....ra.html ничего не изменится
|
| |
| |
| Bass85 | Дата: Понедельник, 16.03.2009, 17:36 | Сообщение # 29 |
Зарегистрирован 12.02.2009
Группа: Опытные
Сообщений: 422
Статус: Offline
| для 40-го есть свой модуль!!!!! и что должно изменится?
|
| |
| |
| юрии | Дата: Понедельник, 16.03.2009, 18:44 | Сообщение # 30 |
Язык программированя: Васик
Зарегистрирован 05.03.2009
Группа: Новички
Сообщений: 572
Город: Югорск
Статус: Offline
| да просто у 40 го сложноватый для меня модуль тем более я ещё не одной платы не сделал я то ль ко учусь
|
| |
| |