|
Подключаем камеру
|
|
| axse | Дата: Среда, 12.11.2008, 16:15 | Сообщение # 16 |
Зарегистрирован 28.10.2008
Группа: Новички
Сообщений: 18
Город: Югорск
Статус: Offline
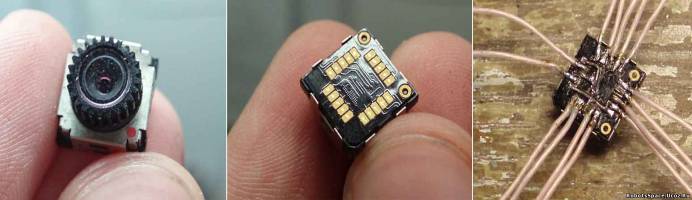
| как можно подсоеденить выходы на камере они такие мелкие подскожите !!!!!!!!!!!!!!!!!!! 
Моя жизнь в http://robotsspace.ucoz.ru
|
| |
| |
| FireFly | Дата: Среда, 12.11.2008, 18:36 | Сообщение # 17 |
Зарегистрирован 04.04.2008
Группа: Модераторы
Сообщений: 196
Город: Kamyshin
Статус: Offline
| паять  тонким жалом, аккуратно... ювелирно можно сказать тонким жалом, аккуратно... ювелирно можно сказать
Robozone
|
| |
| |
| axse | Дата: Среда, 12.11.2008, 19:13 | Сообщение # 18 |
Зарегистрирован 28.10.2008
Группа: Новички
Сообщений: 18
Город: Югорск
Статус: Offline
| у меня тонкого нет. а можно выжегателем?
Моя жизнь в http://robotsspace.ucoz.ru
|
| |
| |
| FireFly | Дата: Четверг, 13.11.2008, 00:22 | Сообщение # 19 |
Зарегистрирован 04.04.2008
Группа: Модераторы
Сообщений: 196
Город: Kamyshin
Статус: Offline
| понятия не имею, первый раз про подобный изврат вообще слышу
Robozone
|
| |
| |
| Assassin | Дата: Воскресенье, 16.11.2008, 21:14 | Сообщение # 20 |
Зарегистрирован 16.11.2008
Группа: Новички
Сообщений: 6
Город: Горловка
Статус: Offline
| Выжыгатель он выжыгыет на дереве рисунки и можно писать аффект как от увеличительнава стекла сматряшева на солнце
|
| |
| |
| Assassin | Дата: Понедельник, 17.11.2008, 17:45 | Сообщение # 21 |
Зарегистрирован 16.11.2008
Группа: Новички
Сообщений: 6
Город: Горловка
Статус: Offline
| народ памагите пожалуйста я вот дастал камеру с motorola c650 и штже делать дальше

 ************************Doniak
чтобы вставить картинку скопируй текст справа от кнопки Обзор $IMA=GE1$ (без знака равнения)
|
| |
| |
| FireFly | Дата: Понедельник, 17.11.2008, 18:21 | Сообщение # 22 |
Зарегистрирован 04.04.2008
Группа: Модераторы
Сообщений: 196
Город: Kamyshin
Статус: Offline
| а ничего если ты не спец в программировании не связывайся и почитай что я выше в топике написал 
Robozone
|
| |
| |
| Space | Дата: Понедельник, 17.11.2008, 18:38 | Сообщение # 23 |
Зарегистрирован 25.12.2007
Группа: Администраторы
Сообщений: 1103
Статус: Offline
| блин  чтож вы все такие наивные!!! не ужели думаете, что если вам скажут как всё подключить, то у вас всё заработает... нет, нет и ещё раз нет чтож вы все такие наивные!!! не ужели думаете, что если вам скажут как всё подключить, то у вас всё заработает... нет, нет и ещё раз нет 
я не говорю, что это сделать не реально в домашних условиях. Нет как раз можно, но очень трудно. Для этого нужно хорошо разбираться в программирование и знать хотя бы азы электроники. И иметь хотя бы малейшее представление как это работает. Цитирую: Quote (Алексей Калиниченко) Мы живем в трёхмерном мире, а смотрим на него лишь двумя глазами. Наши глаза передают в мозг две картинки, из которых он формирует представление об окружающем пространстве. Роботам, обычно получающим визуальную информацию при помощи видеокамер, тоже нужно знать о трёхмерной структуре мира. Но если мозг может легко понять, какие объекты на картинках, полученных от каждого из глаз, соответствуют друг другу, то компьютеру справиться с этой задачей не так просто. Давайте рассмотрим, как люди воспринимают трёхмерный мир. Для этого мы используем как минимум три инструмента. Прежде всего, конечно, бинокулярное зрение. Поскольку наши глаза отстоят друг от друга на некоторое расстояние, то анализируя картинки, полученные с их помощью, мозг может судить о том, какие предметы находятся дальше от нас, а какие ближе. В самом деле, если мы знаем расстояние между двумя точками (глазами) и углы, под которыми видим третью, то при помощи несложных тригонометрических формул мы можем найти и расстояние от третьей точки до любого из глаз. Следующий инструмент основан на, казалось бы, недостатке человеческого глаза - он имеет конечную глубину резкости, то есть мы не можем видеть с хорошей резкостью сразу оба предмета, если первый находится от нас на расстоянии один метр, а второй удалён на десять метров. Соответственно если изображения двух предметов будут резкими, то можно сделать вывод, что они находятся на приблизительно одинаковом расстоянии от нас. И третий, уже скорее психологический, инструмент использует тот факт, что мы обычно имеем дело с хорошо знакомыми нам предметами - например, все примерно представляют, какого размера должна быть табуретка или кровать. Поэтому для определения расстояния до таких предметов мозгу достаточно знать, какая площадь на сетчатке занята их изображением. Естественно, что все эти методы работают в комплексе, дополняя и уточняя друг друга. Огромную роль также играет способность человека выделять объекты из того потока информации, которую он получает благодаря органам зрения. Грубо говоря, когда мы входим в незнакомую комнату, нас не интересует форма стоящего в углу кресла, нам нужно лишь знать, с какой стороны и как далеко от нас оно находится. А вот роботу, как уже было сказано, даже идентифицировать кресло на изображении комнаты не всегда под силу.
Какими же из этих методов могут воспользоваться роботы? Проще всего реализовать второй способ. В самом деле, роботу достаточно иметь один-единственный глаз, и при этом чем меньше у него глубина резкости, тем лучше. Надо "прогнать" камеру по всему диапазону фокусных расстояний и на полученной картинке определить дальность до каждой точки. Но за простотой этого метода скрывается и его недостаток - низкое разрешение. Определить степень сфокусированности можно только для относительно большого по площади предмета; более того, он еще должен быть неравномерно окрашен. Роботу трудно ориентироваться в пустой комнате с чистыми белыми стенами, зато расстояние до какой-нибудь решётки он вычислит точно. Теперь рассмотрим двуглазого робота, который для определения расстояния до предметов использует бинокулярное зрение. Тут возможны два случая: или заранее известно взаимное расположение камер (они закреплены жёстко), или потребуется определять положение камер. С первым случаем, казалось бы, все просто: берём точку на одном кадре, ищем соответствующую ей на другом и определяем расстояние до камер. Но все как раз и упирается в поиск соответствий между точками. Для некоторых областей изображения таких соответствий может не оказаться - например, одна из пары соответствующих точек будет чем-то загорожена. Но даже если все соответствия имеются, то найти их будет очень не просто. Рассмотрим простейший случай: наш двуглазый робот смотрит на кубик с гладкими однотонными стенками, и как бы мы ни старались и не разглядывали изображения, полученные с каждого из глаз, найти соответствующих пар точек больше, чем углов у кубика, невозможно. А даже по восьми точкам (предположим, что видны все углы) пытаться восстановить сцену, не зная, что на ней куб, - задача нереальная. Какие есть пути решения данной проблемы? Можно искать на изображениях соответствия не только точек, но и прямых и эллипсов (проекция окружности). Ведь роботы скорее всего будут находиться в антропогенной среде, а современные офисные интерьеры и городские пейзажи практически полностью состоят из прямых линий, да и окружности встречаются нередко. Вернёмся к примеру с кубом. Пусть нам удалось найти соответствия между углами, тогда отыскать отрезки, соединяющие углы, и разбить их на пары соответствия, тоже не составит труда. Далее можно сделать предположение, что четыре отрезка, образующих замкнутую ломаную, ограничивают плоскость. Вот наша задача и решена! Теперь мы можем построить тот самый куб, составив его из плоскостей. Если наш робот наткнется на кружку или кастрюлю, он без труда распознает в ее основании окружность, что поможет ему "разобраться" и с формой этого предмета. Но иногда жёстко закреплять глаза робота нецелесообразно или вообще не нужно, поскольку восстановить положение камер по двум снимкам не слишком трудно. К тому же это решение зачастую дает более высокую точность, нежели механическое соединение камер. Да и возможность независимо оперировать двумя глазами довольно заманчива, особенно в тех задачах, где не требуется восприятие трехмерной информации (например, такой робот сможет одновременно читать две страницы книги). Так как же восстанавливают положение камер по кадрам? Для этого нам опять потребуются пары соответствующих точек на каждом из изображений (обычно не меньше семи пар). При смене камеры мы просто меняем центр и направление проецирования; таким образом, пара камер характеризуется вектором сдвига (он соединяет оптические центры камер) и поворотом в пространстве одной относительно другой. Если мы посмотрим на две фотографии одного предмета, сделанные с разных точек, то сможем достаточно точно указать искомые параметры пары камер. При этом мы будем руководствоваться изменением взаимного положения точек на фотографиях. Рассуждать мы будем примерно так: "вот этот отрезок стал длиннее, следовательно, теперь он стал более перпендикулярным по отношению к камере, а вот этот короче, а этот повернулся…". Руководствуясь подобными же соображениями, можно построить математическую модель и с её помощью достаточно точно восстановить параметры пары камер. После того как взаимное положение камер известно, можно для любой точки одного изображения найти прямую на другом, которая будет проходить через точку, соответствующую в пространстве первой. Эта прямая называется эпиполярной и соответствует проекции (e'p') на вторую камеру прямой (OP), соединяющей точку в пространстве (P) с оптическим центром первой камеры (O). Понятно, что конфигурация эпиполярных линий определяется только параметрами пары камер и не зависит от конфигурации 3D-сцены.
После того как построены эпиполярные линии, мы можем искать точку, соответствующую данной, не по всему второму изображению, а только вдоль эпиполярной прямой, что не только сильно снижает вычислительную сложность алгоритма, но и позволяет находить такие соответствия, которые другими методами просто были бы пропущены. Вернёмся к примеру с кубом. Пусть у нас уже построены эпиполярные линии и найдены соответствия между вершинами и гранями куба. Теперь мы можем для любой точки на грани куба найти соответствие: строим эпиполярную линию, которая пересечет грань куба на втором изображении в единственном месте, оно-то и будет точкой, соответствующей первой. Вспомним про третий инструмент человеческого восприятия трехмерного пространства - выявление знакомых предметов со знакомыми размерами. Этот метод применим только для довольно узкого класса задач. Например, индустриальный робот только и делает, что перекладывает пять различных типов заготовок с места на место и вполне может их "узнавать", а вот для ориентирования в произвольном помещении такой метод вряд ли подойдет. Знаменитый робот-собака Aibo может находить и узнавать свои игрушки, но для этого они специальным образом раскрашиваются. Можно и с одной камерой составить представление о трехмерном мире, но для этого роботу придется двигаться и, сохраняя предыдущие кадры в памяти, использовать их аналогично кадрам со второй камеры. При таком алгоритме существенно упрощается поиск парных соответствий. Ведь если сохранять кадры часто, то на двух соседних соответствующие точки будут лежать недалеко друг от друга. Более того, если результат покажется недостаточно точным, можно продолжить движение и уточнить его. Теперь рассмотрим возможности, которые недоступны человеку, но вполне могут быть реализованы в роботах. Существенно увеличить точность восстановления 3D можно, используя третий глаз. Именно так и поступила компания Sony, спроектировав робота Qrio. Правда, он использует третий глаз не только для ориентирования в пространстве, но и для увеличения многозадачности. Все описанные методы являются пассивными - робот не генерирует никаких сигналов. Существуют также и активные системы; некоторые из них сродни эхолотам дельфинов и акустическим радарам летучих мышей. Робот посылает направленную акустическую или электромагнитную волну и по отраженной волне, которую сам и принимает, получает информацию о расстоянии до преграды. Такой аппаратурой обычно оснащаются роботы, действующие на открытой местности, где оптические методы не всегда эффективны (выбрать соответствующие друг другу точки очень трудно из-за сложной формы объектов и обилия сильно текстурированных областей). Рассмотрим системы с оптической подсветкой. Если установить на робота одну камеру и лазер, который создает яркое пятнышко на поверхности предметов, то по скорости перемещения пятна можно судить о дистанции до предмета, а по ускорению - о наклоне поверхности (при наличии двух или более камер). Таким образом, можно "прощупать" лазером все поле зрения робота. Но согласитесь, многим не понравится, если механический курьер в офисе будет всюду шарить лазером. Впрочем, можно взять лазер, излучающий в невидимом диапазоне. Ещё более изящное решение - использовать структурированную подсветку. Всё поле зрения робота засвечивается лазерной решёткой, и расстояние до преграды определяется по шагу решётки на кадре: чем он больше - тем и расстояние больше. Такие системы не смогут работать с зеркальными поверхностями, но согласитесь, что в стеклянном лабиринте не сможет сориентироваться даже человек, поэтому всерьёз этот недостаток воспринимать не следует. В существующих системах обычно используются несколько методов. Ведь в условиях, неблагоприятных для одного из них, другой может дать неплохие результаты, а одновременное применение разных методов позволяет сильно уменьшить вероятность ошибки. |
| |
| |
| Assassin | Дата: Понедельник, 17.11.2008, 19:18 | Сообщение # 24 |
Зарегистрирован 16.11.2008
Группа: Новички
Сообщений: 6
Город: Горловка
Статус: Offline
| непотскажыте книгу каторая пригадится в этом деле 
|
| |
| |
| Tren | Дата: Вторник, 03.02.2009, 20:12 | Сообщение # 25 |
Зарегистрирован 25.01.2009
Группа: Новички
Сообщений: 31
Город: Гатчина
Статус: Offline
| Вот что то нашёл  Cmucam - это камера с цифровым выходом + контроллер, анализирующий сигналы с нее и выдающий результат в зависимости от заданного
режима. Режимы: * выдавать уровни сигнала по каналам
* отслеживать размер и цвет пятна
* центровка (самонаведение или удержание) пятна либо в окне заданного размера, либо произвольного размера по центру. Возможно это еще не все, надо инструкцию переводить.
Получить в свои руки "смукам" очень просто: достаточно заплатить в интернет-магазине, (например, в active robots) 108 английских фунтов стерлингов (с доставкой, разумеется)...
 Разумеется, серва - за отдельные деньги...
На зеленой платка с объективом стоит собственно ПЗС-матрица. Здесь использована камера с цифровым выходом, в отличие от распространенных видеоглазков, в которых используется аналоговый выход. Подобные матрицы ставятся в мобильники с фотокамерами. Проверить работоспособность камеры можно только тестами и демо-программой. В комплекте есть несколько рабочих примеров программ. Сразу выяснилось, что в инструкции не зря предупреждают про освещение: камера немного страдает дальтонизмом :). Хорошо работает только при хорошем освещении, не любит лампы накаливания. В демо-роликах на сайте производителя показано, как робот, оборудованный смукам, следит за красным мячиком или синим кирпичиком. Это неспроста: камера различает объекты только этих двух цветов. :( При этом уровни сигналов по цветам выдаются все полностью, RGB, но в Interactive C почему-то есть только команды track blue, track orange, на попытку пробовать заменить blue на green - выдает ошибку, нет такой команды. Самое интересное, что для полноценной работы камере достаточно интерфейса со скоростью всего-навсего 9600 бит/сек, хотя, к примеру, загрузка одного кадра даже на скорости 115 кбит занимает секунд 5. Но смукам в рабочем режиме выдает не видео, а команды для контроллера робота - размер, положение, цвет объекта, команды для слежения, уровни сигналов по каналам - RGB. Есть демо-программа для контроллера Хендиборд - она выдает на индикатор контроллера цвет и размер объекта - различает, как как было уже сказано, только синие и красные (оранжевые), на попытки подсунуть объекты других цветов реагирует так же, как на отсутствие объекта - пишет "нет ничего".
|
| |
| |
| FireFly | Дата: Вторник, 03.02.2009, 23:19 | Сообщение # 26 |
Зарегистрирован 04.04.2008
Группа: Модераторы
Сообщений: 196
Город: Kamyshin
Статус: Offline
| боян , тыщу лет как... давным давно вторая версия есть. И ИМХО оно своих денег не стоит софсем.
Robozone
|
| |
| |
| Doniak | Дата: Среда, 29.04.2009, 19:41 | Сообщение # 27 |
Язык программированя: CodeVisionAVR Си
Зарегистрирован 19.03.2008
Группа: Модераторы
Сообщений: 584
Город: Кривой Рог (Днепропетровск)
Статус: Offline
| Quote (axse) Всем привет я новенькии.
вопрос можно подключить камеру от siemens c75 ?
если да то как ?
ну как там успехи?
|
| |
| |
| юрии | Дата: Среда, 29.04.2009, 20:13 | Сообщение # 28 |
Язык программированя: Васик
Зарегистрирован 05.03.2009
Группа: Новички
Сообщений: 572
Город: Югорск
Статус: Offline
| Doniak, Axse мой друг он даже назвался моим иминеи  короче он уехал кудато навсегда а вестей от него нет да и камеру он ту проплавил когда поял короче он уехал кудато навсегда а вестей от него нет да и камеру он ту проплавил когда поял Добавлено (29.04.2009, 20:13)
---------------------------------------------
а я по советам FireFly, купил камеру
|
| |
| |
| Doniak | Дата: Суббота, 09.05.2009, 21:23 | Сообщение # 29 |
Язык программированя: CodeVisionAVR Си
Зарегистрирован 19.03.2008
Группа: Модераторы
Сообщений: 584
Город: Кривой Рог (Днепропетровск)
Статус: Offline
| Quote (юрии) да и камеру он ту проплавил когда поял lol
А у меня от так получилось
|
| |
| |
| юрии | Дата: Суббота, 09.05.2009, 21:28 | Сообщение # 30 |
Язык программированя: Васик
Зарегистрирован 05.03.2009
Группа: Новички
Сообщений: 572
Город: Югорск
Статус: Offline
| а он не мог ни как припоять со злости прожог на сквозь
|
| |
| |
|