Quote (Space)
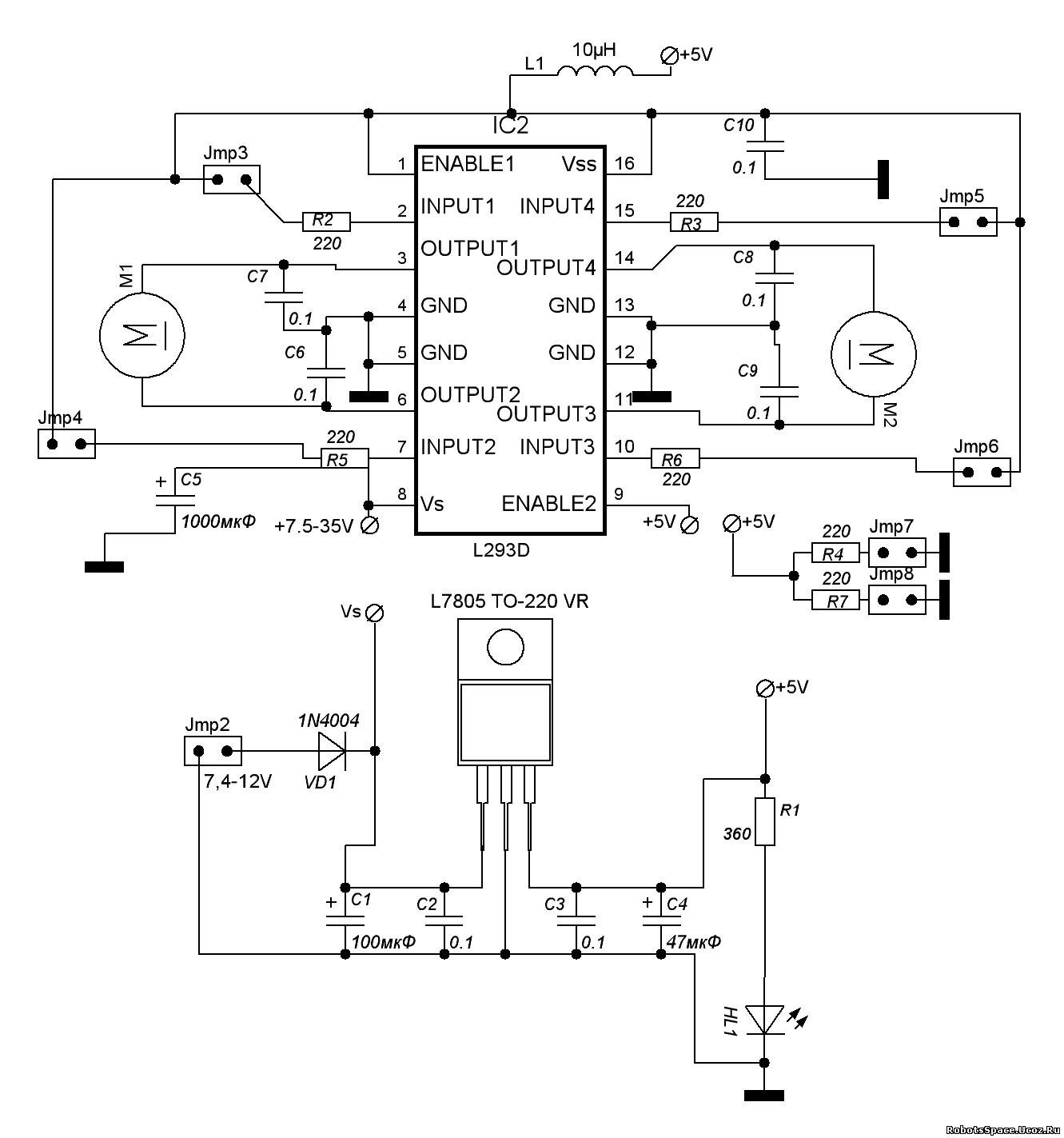
ещё, обвязочки из конденсаторов на 0,1мкФ не хватает на драйвер и стабилизатор. Конечно можно опустить, но по опыту знаю, что драйвер не хилые помехи создаёт при работе на мк, поэтому прога может работать не точно.
А ты не мог бы в схему подставить, если не трудно?