ну извини... 
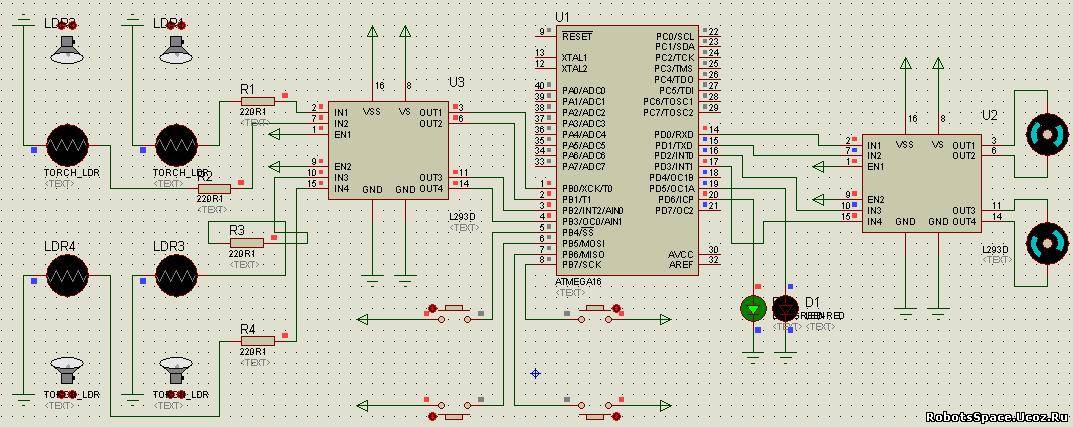
Короч, я решил добавить роботу чутка характера) Пока что имеет всего 2 типа датчиков, поэтому и реакции я ему пока тока 2 придумал на данные поступающие с этих самых датчиков. Я решил плюсом ко всей переферии сначало добавить всего один светик, ну так чтобы был, а потом решил почему бы роботу не показывать свои эмоции с помощью светиков (зеленого и красного) - когда робот будет врезаться слишком часто и не находить свет, то будет злитсо (помигивая красным после каждого столкновения), а когда его совсем задолбет - он остановится и 3 раза медленно помигает красным светиком (матом короч поругаится), что касательно зеленого - если поиграть с роботом с фонариком например (ну или если он сам натолкнется на свет), то его настроение немного поднимется (злостные баллы, набранные на столкновениях будут понижаться), приступы радости я ему тоже сделал, но дабы меня самого потом не бесило, приступ радости у него будет почти не заметен, просто трижды быстренько мигнет и все, почти не тормозя работу робота, в обсчем вот такие пироги, есть возражения или предложения?
Код проги кину в файл ниже (компилятор - CV AVR):smile3:
Добавлено (05.08.2008, 22:19)
---------------------------------------------
Сек... с прогой косяк небольшой вылетел, ща поправлю и сида же кину, вместо той)))
Добавлено (05.08.2008, 22:43)
---------------------------------------------
Вот все, теперь еще лучше даже стало (пару возможных глюков исправил) 
Добавлено (07.09.2008, 17:33)
---------------------------------------------
Слушай, Space, на той схеме для фотодатчиков я че-то не совсем догнал как питание подрубать надо?



 )
)