Ранее мы опубликовывали схему экспериментального сдвоенного сенсора на базе аудио усилителей LM386 и компаратора.
Схема была вполне работоспособная и мы провели с ней много интересных
экспериментов. В данный момент было решено начать использовать
обработку звука непосредственно на роботах. Для этого и был разработан
данный модуль.
Так как в предыдущем экспериментальном модуле LM386
показал себя исключительно с положительной стороны, то естественно мы
его и использовали. Схема практически идентична схеме усилителя для
одного канала от старого модуля (модуль для усиления сигнала для одного
микрофона), за исключением некоторых изменений:
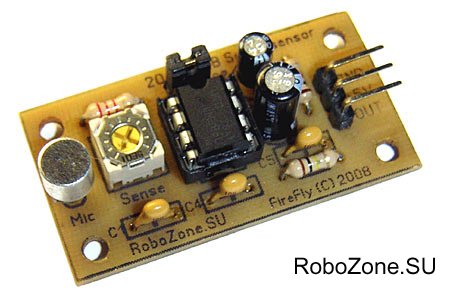
- добавлена возможность точной настройки чувствительности микрофона с помощью построечного резистора;
- добавлена возможность выбора коэффициента усиления микросхемы 20 или 200 с помощью перемычки;
- из схемы был удален компаратор – на выходе исключительно аналоговый сигнал.
- выход с усилителя «подтянут» через резистор на землю.
Мы
решили отказаться от применения компаратора в новом модуле, так как
запланировали обработку сигнала через АЦП микроконтроллера (или через
внешнюю АЦП). Простая обработка сигнала через АЦП каких либо сложностей
не представляет (в дальнейшем мы опубликуем пример на BASCOM AVR).
Дополнительно выход с усилителя «подтянули» резистором на 100к к земле
с целью получения более четкого сигнала. Как видно модуль теперь имеет
один канал, что улучшило помехоустойчивость и позволило максимально
уменьшить габариты печатной платы.

В
модуле так же как и ранее применены микрофоны от сотовых телефонов,
запаянные непосредственно на печатной плате. Чувствительность на
человеческий голос – отличная. Сенсоры прошли тестирование как с АЦП
так и в роли простого микрофонного усилителя. Осциллограммы показали
выход чистого аудио сигнала без лишних наводок и помех. Благодаря
подстройке чувствительности микрофона и возможности выбора усиления
модуль можно настроить практически под любые задачи. Печатная плата звукового сенсора выполнена в одностороннем варианте, и не представляет ни каких сложностей при повторении.
Схема модуля в формате sPlan 6.0, разводка печатной платы под ЛУТ в формате Sprint-Layout 4.0 вы можете скачать тут.
Источник: http://robozone.su/2008/07/08/zvukovojj-sensor-na-osnove-audio-usilitelja-lm386.html | 

 roboforum
roboforum
