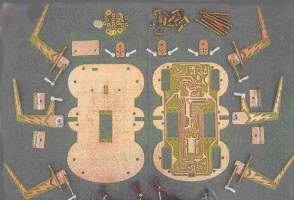
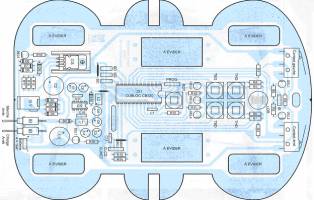
Вот такого паучка можно собрать без всяких конструкторов и притом не много на это потратить денег. Как видно из рисунка корпус из текстолита с протравленными рисунками для красоты (если так делать то лучше потом скрыть текстолит лаком для того чтобы ваши рисунки были всегда блестящими и не окислились и не стали коричнево зелеными) Используется только три сервы можно мини сервы а можно и стандартные.
Может ходить вперед назад вправо влево. Имеет инфракрасный дальномер и датчики – усики на столкновение. 
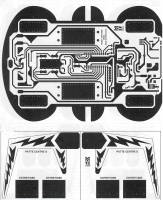
Плата начинки этого робота вытравлена прямо на его корпусе (по-моему это не очень хорошо для дальнейших модернизаций хотя если вывести все выводи контроллера на разъемы тогда можно будет добавлять платы как в материнку ПК).
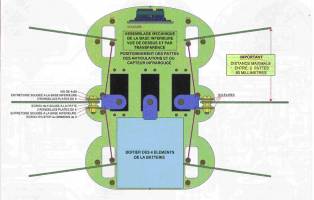
Алгоритм ходьбы такой средние лапы могут подымать корпус то с одной стороны то с другой при этом та сторона которая в воздухе переставляет лапы в другое положение.
Поднял левую сторону переставил левые ноги (они связаны и двигаются в месте) опустил левую поднял правую сторону и также переставил ноги. Чтобы поворачивал нужно одну сторону ног передвигать при поднятии в перед а другую назад.

Еще бы серву на голову и усики были бы больше для вида а робот выглядел бы еще более правдоподобно.
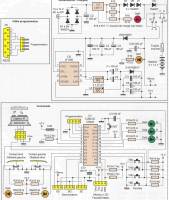
По поводу схемы она показана как пример и ее не обязательно повторять.
В двух словах о схеме. Схема довольно простая первая микросхема это специальный контроллер его характеристики приведены в конце хочу сказать ч то она удобная и это хороший выбор для иностранных радиолюбителей, а у наших же сразу появится вопрос, а где же остальные 40! Ног Atmega128? Так что я бы запаял саму 128 а не это хоть и не нужно столько ног для реализации именно этого набора возможностей робота но было бы на вырост.
Вторая микросхема это импульсный преобразователь для питания серв ну а третья всем известная LM317 используется как генератор тока для заряда аккумуляторов.

А это усики они со светодиодами на концах.









 Вообщем намаялся и пропало желание.
Вообщем намаялся и пропало желание. 


